1. 引言
1.1 为什么需要自主导航?
想象一个仓库机器人——它需要在货架之间穿梭,精准取货,同时避开突然出现的叉车和行人。或者一辆无人驾驶汽车,需要在复杂交通中安全行驶数百公里。这些场景的背后,都依赖一套精心设计的自主导航系统(Autonomous Navigation System)。
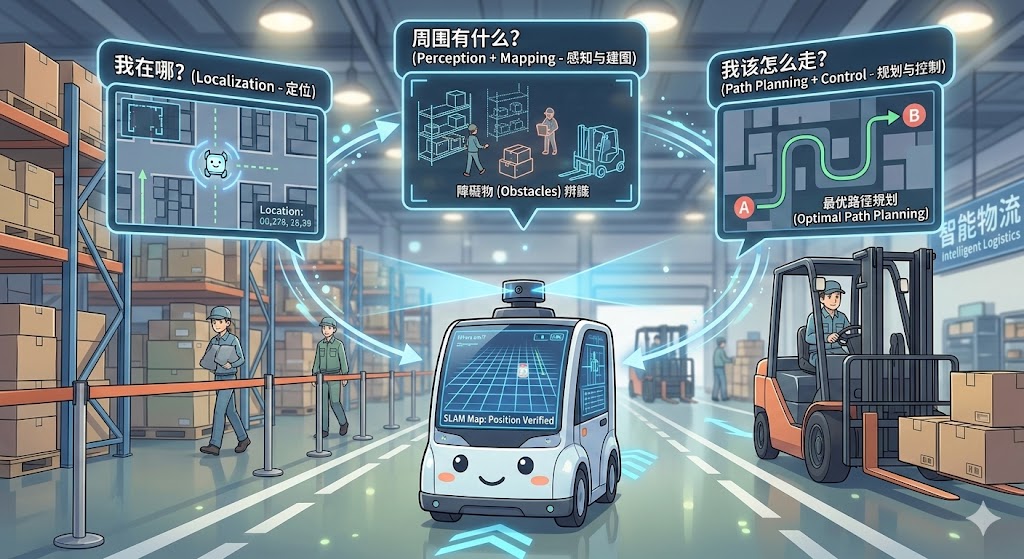
自主导航解决的核心问题,可以简单概括为三个问题:
- 我在哪?(Localization,定位)
- 周围有什么?(Perception + Mapping,感知与建图)
- 我该怎么走?(Planning + Control,规划与控制)
这三个问题环环相扣,共同构成了机器人导航的完整闭环。
1.2 导航算法栈概览
一个完整的机器人导航系统,数据从传感器出发,经过层层处理,最终驱动执行器运动。下图展示了导航算法栈的整体数据流:
flowchart LR
subgraph Sensors["传感器层"]
L[激光雷达\nLiDAR]
C[相机\nCamera]
I[IMU]
O[里程计\nOdometry]
end
subgraph Perception["感知层"]
PF[点云滤波\nPoint Cloud Filter]
FE[特征提取\nFeature Extraction]
SF[传感器融合\nSensor Fusion]
end
subgraph LocalizationMapping["定位与建图层"]
LOC[定位\nLocalization\nEKF/PF/NDT]
MAP[建图/SLAM\nMapping/SLAM]
end
subgraph Planning["规划层"]
GP[全局规划\nGlobal Planner\nA*/RRT*]
LP[局部规划\nLocal Planner\nDWA/TEB]
CM[代价地图\nCostmap]
end
subgraph Control["控制层"]
PT[路径跟踪\nPath Tracking\nPure Pursuit/LQR]
end
subgraph Actuator["执行层"]
ACT[底盘驱动\nChassis Drive]
end
Sensors --> Perception
Perception --> LocalizationMapping
LocalizationMapping --> Planning
CM --> Planning
Planning --> Control
Control --> Actuator
Actuator -->|里程计反馈| Perception
1.3 传统导航 vs. 学习型导航
在深度学习兴起之前,机器人导航主要依赖模块化、可解释的传统算法栈。每个模块职责清晰,可以独立调试和优化。本文将系统介绍这套算法栈的核心组件。
| 维度 | 传统导航 | 端到端深度学习导航 |
|---|---|---|
| 可解释性 | ✅ 强,每个模块可分析 | ❌ 弱,黑盒决策 |
| 泛化性 | ❌ 弱,依赖先验地图 | ✅ 较强,可迁移到新场景 |
| 语言理解 | ❌ 不支持自然语言指令 | ✅ 支持(VLN/VLA) |
| 调试难度 | ✅ 低,模块独立调试 | ❌ 高,端到端难追溯 |
| 计算需求 | ✅ 低,可在嵌入式运行 | ❌ 高,需要GPU |
| 安全可靠性 | ✅ 行为可预测 | ❌ 分布外泛化存在风险 |
| 动态障碍处理 | 局部规划模块可处理 | 依赖训练数据覆盖 |
本文聚焦传统算法栈。如需了解端到端学习导航(VLN/VLA),请参考本站 VLN综述 系列。
2. 感知(Perception)
感知是导航系统的”眼睛”。传感器采集原始数据,经过处理后为定位、建图和规划提供可靠输入。
2.1 传感器类型与特性对比
| 传感器 | 输出数据 | 精度 | 抗光照 | 成本 | 典型频率 | 典型应用 |
|---|---|---|---|---|---|---|
| 2D 激光雷达 | 极坐标点集 | 高(cm级) | ✅ 强 | 中 | 10–40 Hz | 室内移动机器人 |
| 3D 激光雷达 | 点云(xyz+强度) | 高 | ✅ 强 | 高 | 10–20 Hz | 自动驾驶 |
| RGB-D 相机 | 彩色图+深度图 | 中(cm–dm级) | ❌ 弱(室外) | 低 | 30–90 Hz | 室内近距离 |
| 单目相机 | RGB 图像 | 低(需标定) | ❌ 弱 | 极低 | 30–120 Hz | 视觉里程计 |
| 双目相机 | 左右 RGB 图 | 中 | ❌ 弱 | 低–中 | 30–60 Hz | 视觉 SLAM |
| IMU | 角速度+线加速度 | 短期高 | ✅ 强 | 极低 | 100–1000 Hz | 姿态估计、融合 |
| 轮式里程计 | 编码器脉冲 | 中(易累积误差) | ✅ 强 | 极低 | 50–200 Hz | 短期位移估计 |
| GPS/RTK | 经纬度坐标 | 普通1–5m,RTK cm级 | ✅ 强 | 中–高 | 1–10 Hz | 室外全局定位 |
激光雷达(LiDAR)
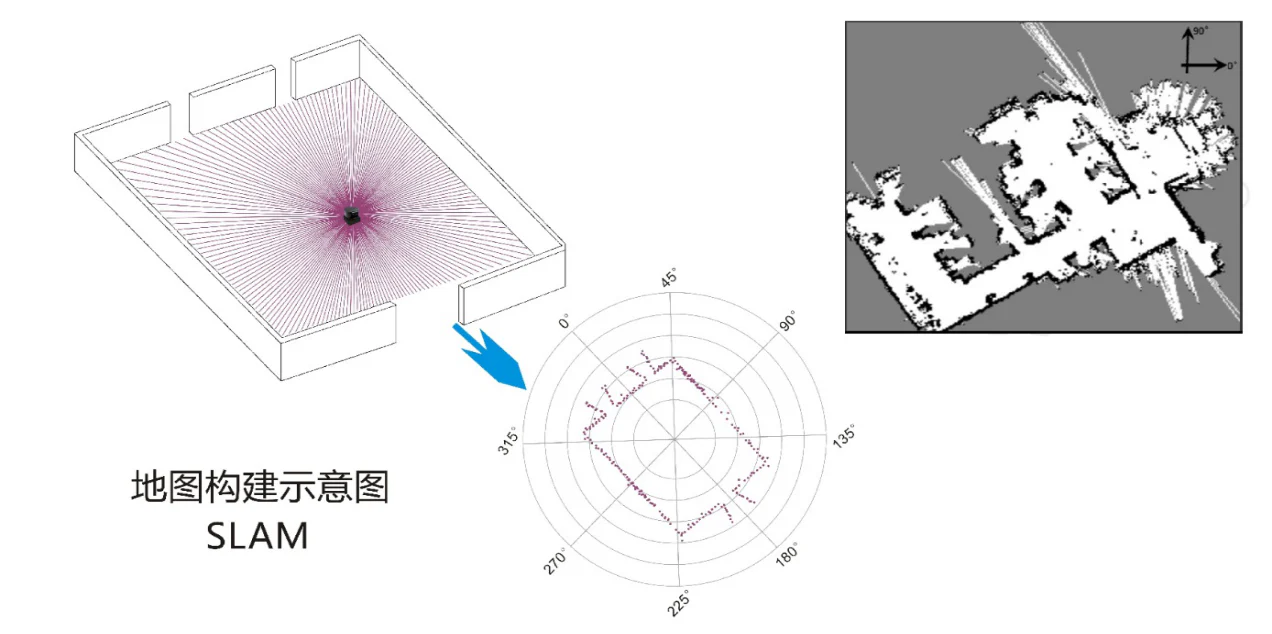
激光雷达通过发射激光脉冲并测量返回时间(Time of Flight, ToF)来计算距离。它能在任意光照条件下工作,输出精确的空间点云(Point Cloud)。
2D LiDAR(如 Hokuyo UTM-30LX、SICK TiM)每次扫描输出一个平面上的极坐标点集,适合室内平坦环境。3D LiDAR(如 Velodyne VLP-16、Ouster OS1)通过多线旋转扫描,输出完整的三维点云,是自动驾驶感知的核心传感器。
深度相机(Depth Camera / RGB-D)
RGB-D 相机(如 Intel RealSense D435、Microsoft Kinect)通过结构光或飞行时间(ToF)原理,同时获取彩色图像和每个像素的深度值。主要局限在于:室外强光会干扰结构光,且探测距离有限(通常 0.3–6m)。
IMU 与轮式里程计
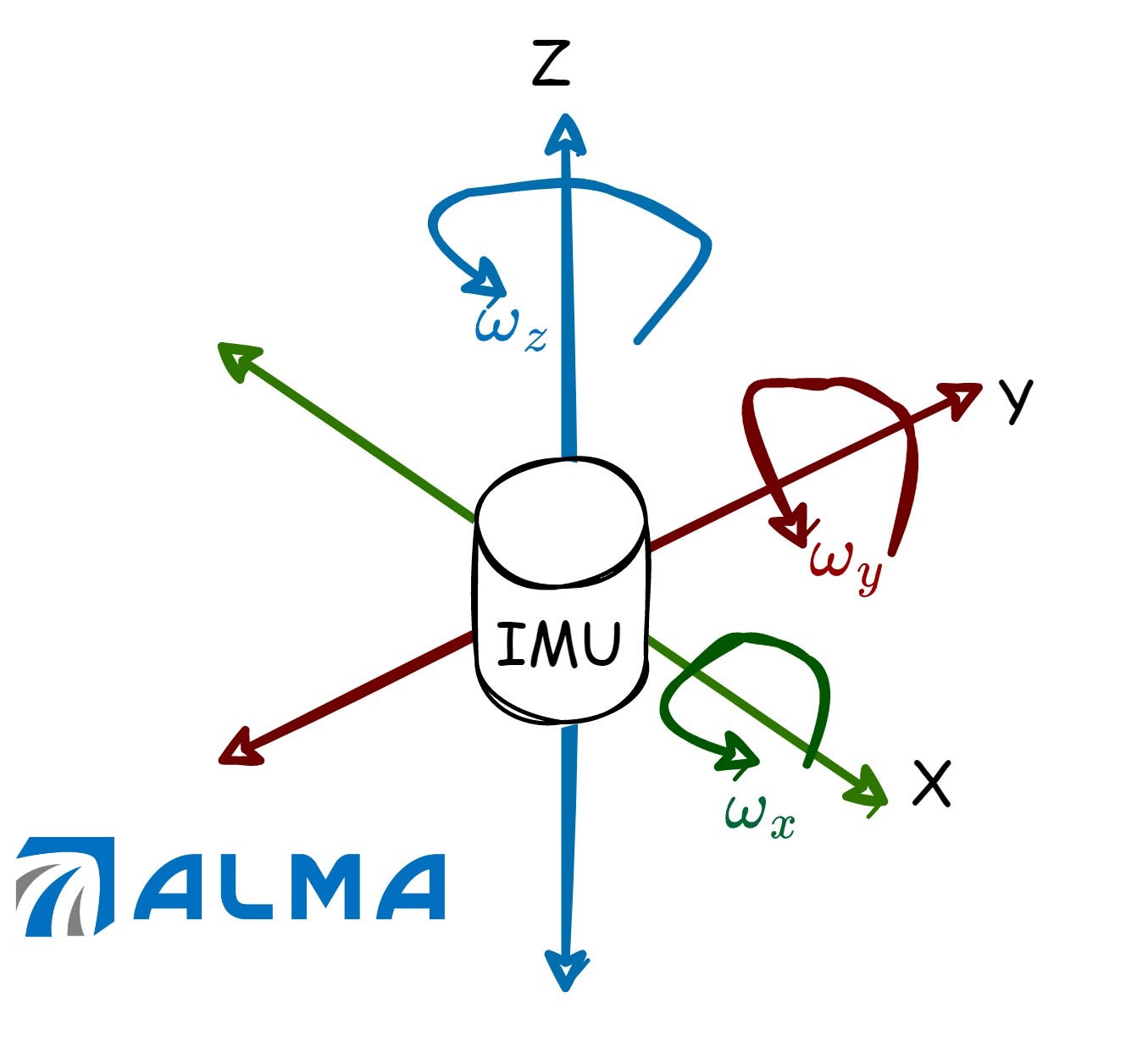
IMU(惯性测量单元) 集成了陀螺仪(测角速度)和加速度计(测线加速度),输出频率高(100–1000 Hz),但误差会随时间积分累积(漂移)。
轮式里程计 通过车轮编码器计算位移,在平坦路面上精度良好,但在打滑或不平整路面上会产生累积误差。
两者的共同特点:短期精度高,长期使用需要与其他传感器融合校正。
2.2 感知数据处理
点云滤波
原始点云通常包含噪声和无关点,需要预处理:
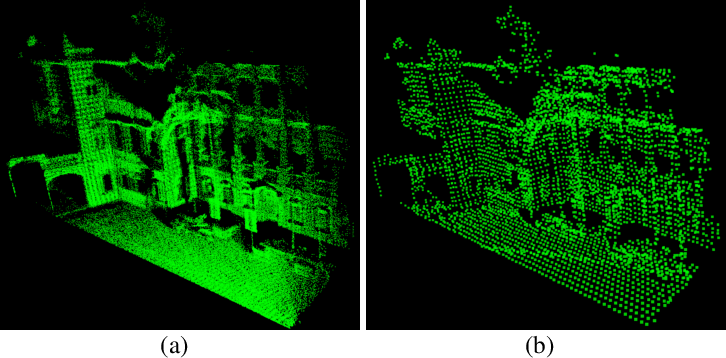
体素滤波(Voxel Grid Filter):将点云空间划分为规则的小立方体(体素),每个体素内的点用质心替代。这样既保留了点云的整体形状,又大幅降低了点云密度,提升后续处理速度。
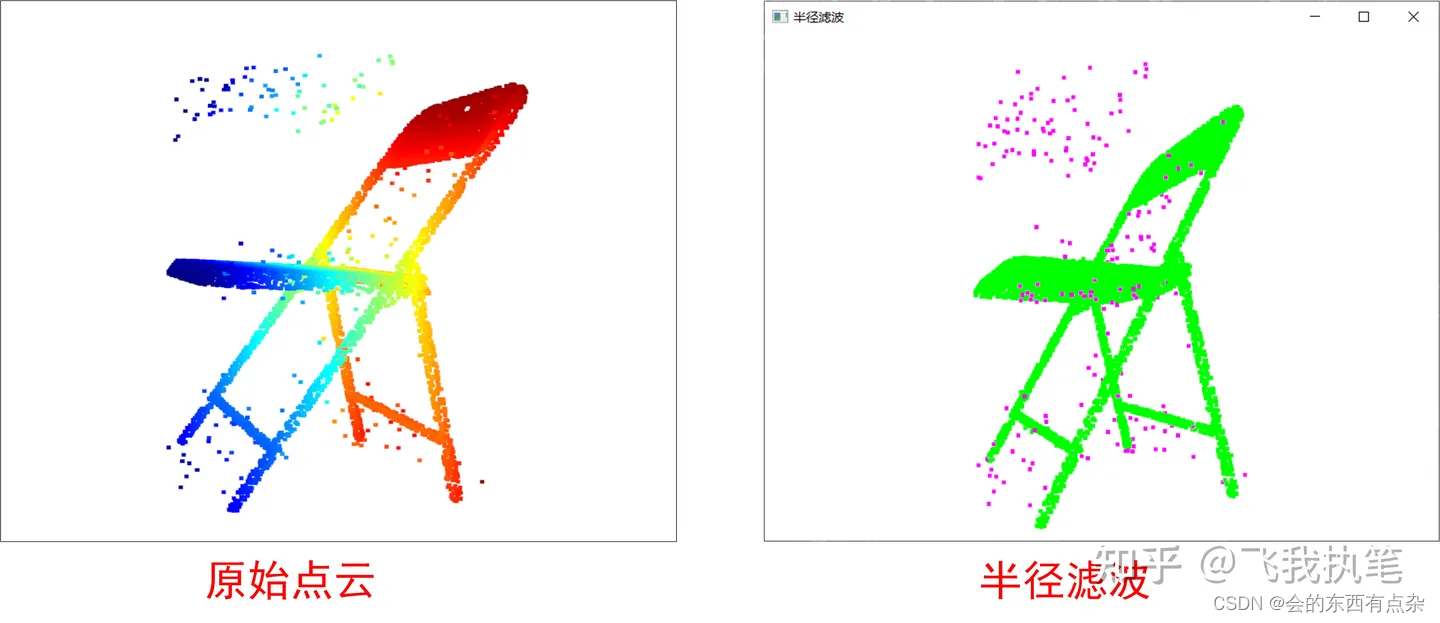
半径滤波(Radius Outlier Removal):对每个点,检查其半径 r 范围内的邻近点数量。若邻近点数不足阈值,则认为该点是噪声并删除。适合去除孤立噪点。
直通滤波(Pass Through Filter):直接截取感兴趣区域的点云,例如只保留地面以上 0.1m 到 2m 高度范围内的点。
矩形拟合检测(Rectangle Fitting Detection)
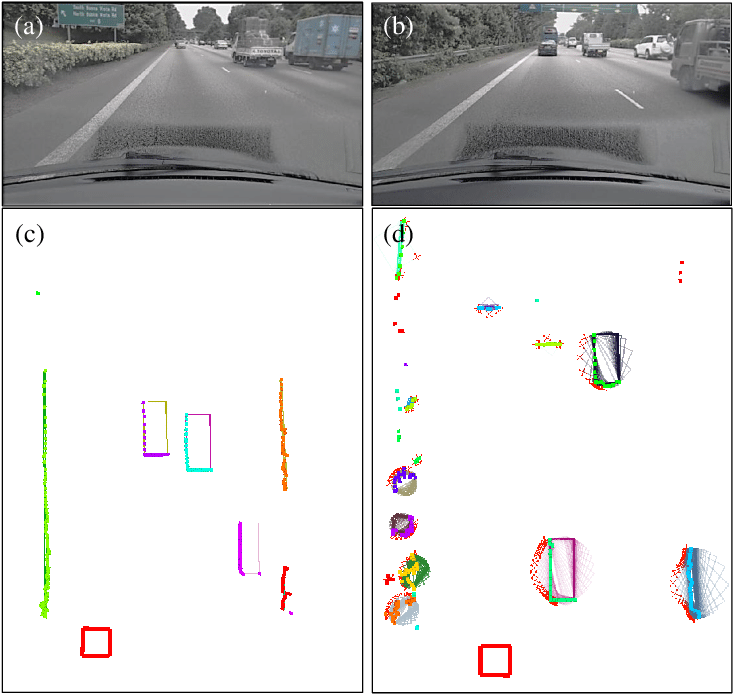
基于激光雷达点云进行障碍物框估计:将聚类后的障碍物点云拟合为最小外接矩形(Minimum Bounding Rectangle),从而估计障碍物的长宽、朝向和中心位置。这是自动驾驶中障碍物感知的经典方法,常用于车辆检测。
特征提取
在视觉 SLAM 和相机标定中,特征提取至关重要:
- 角点特征(Corner):如 FAST(速度极快)、Harris(经典)
- 描述子(Descriptor):如 ORB(旋转不变 + 二进制,速度快)、SIFT(尺度/旋转不变,精度高但慢)
- 线特征(Line):用于结构化室内环境(走廊、墙壁)
2.3 传感器外参标定
当系统使用多个传感器时,必须知道它们之间的相对位姿关系(外参,Extrinsic Parameters),才能将不同传感器的数据转换到同一坐标系。
基于 UKF 的外参估计:利用无迹卡尔曼滤波(UKF) 对外参进行在线估计。与标定板离线标定相比,这种方法可以在机器人运动过程中动态估计并修正外参,适合传感器安装位置可能微小变化的场景。
传感器时间同步
多传感器系统除了空间标定(外参)之外,时间同步同样至关重要。如果不同传感器的数据时间戳未对齐,会导致数据”不同步”——例如用 0.1 秒前的 IMU 姿态去处理当前帧激光点云,在机器人高速运动时误差不可忽略。
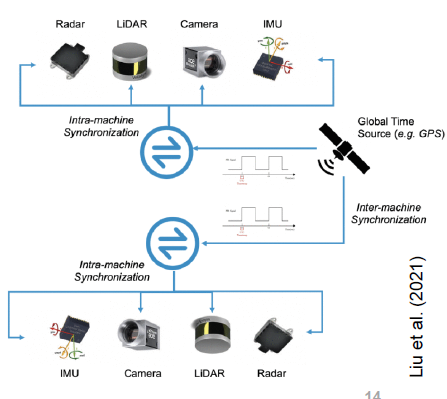
硬件触发同步(Hardware Trigger):通过电路信号使所有传感器在同一时刻采样。例如 GPS 的 PPS(每秒脉冲)信号作为主时钟,触发相机快门和激光雷达扫描。这是精度最高的方法,时间误差可低至微秒级,但需要专用硬件电路支持。
软件时间戳插值(Software Interpolation):当硬件触发不可行时,通过高精度系统时钟(如 NTP/PTP)为每个传感器数据包打时间戳,然后在软件层按时间戳对齐数据。常见做法是 IMU 数据按线性插值对齐至最近的激光帧时刻。
时间戳不对齐对 SLAM 的影响:激光雷达在一帧扫描期间(约 100 ms)机器人持续运动,若不使用 IMU 时间戳做运动补偿(Motion Distortion Correction),扫描点云会出现畸变(Distortion)——前半帧和后半帧点云错位,严重影响扫描匹配精度。LIO-SAM 等紧耦合方案正是通过 IMU 预积分解决这一问题。
2.4 传感器融合
单一传感器往往存在局限,融合多个传感器可以取长补短。
EKF(扩展卡尔曼滤波)融合:将不同频率、不同误差特性的传感器数据(如 IMU 高频姿态 + GPS 低频位置 + 里程计位移)统一融合。EKF 通过预测步骤(用运动模型预测状态)和更新步骤(用传感器观测修正预测)交替进行。
UKF(无迹卡尔曼滤波)融合:EKF 用一阶线性化近似非线性系统,而 UKF 用Sigma 点采样更精确地近似非线性变换的均值和协方差,在高非线性场景下精度更高。
EKF 传感器融合数据流(以多传感器机器人为例):
flowchart LR
subgraph Sensors["传感器输入"]
IMU["IMU\n100–1000 Hz\n高频,短期精确"]
ODO["轮式里程计\n50–200 Hz\n平坦路面好"]
GPS["GPS/RTK\n1–10 Hz\n全局坐标,低频"]
LID["激光雷达匹配\n10–40 Hz\n中频,可给位置修正"]
end
subgraph EKF["EKF 融合核心"]
P["预测步骤\n用运动模型 + 里程计/IMU\n协方差 P 增大"]
U["更新步骤\nKalman Gain K\n协方差 P 减小"]
end
OUT["融合后位姿\n位置 + 速度 + 朝向\n高频输出"]
IMU -->|预测| P
ODO -->|预测| P
GPS -->|更新| U
LID -->|更新| U
P --> U
U --> OUT
OUT -->|滑动反馈| P
3. 定位(Localization)
定位解决的是”我在哪”的问题:给定一张地图,机器人需要实时估计自身在地图中的位置和朝向(即位姿 Pose = 位置 + 朝向)。
3.1 问题定义
定位问题可以分为两类:
- 全局定位(Global Localization):机器人不知道初始位置,需要从头确定自身位姿。难度最大,粒子滤波擅长处理这类问题。
- 位姿跟踪(Pose Tracking):已知近似初始位姿,在运动过程中持续修正。EKF/UKF 擅长处理这类问题。
- 绑架问题(Kidnapped Robot Problem):机器人在运动中被突然移动到陌生位置,需要重新定位。
3.2 EKF 定位
直觉理解:想象你蒙眼走路,靠步数和转弯角度估计自己的位置(这是”预测”);每当你摘下眼罩瞥一眼地图上的路标,就用路标位置来修正你的估计(这是”更新”)。EKF(Extended Kalman Filter)做的就是这件事的数学版本。
状态向量:$\mathbf{x} = [x, y, \theta]^T$(位置 + 朝向)
两步走:
- 预测步骤(Predict):利用运动模型(如里程计数据)预测下一时刻的位姿,同时误差协方差增大(不确定性增加):
- 更新步骤(Update):利用传感器观测(如激光雷达看到路标)修正预测,误差协方差减小(不确定性降低):
其中 $\mathbf{K}_t$ 是卡尔曼增益,决定了相信预测还是相信观测。
卡尔曼增益 K 的直觉理解:想象你朋友告诉你”你现在在图书馆门口”,但你的步数估计说你在图书馆里面。你该信谁?K 的大小决定了这个权衡:
- K → 1(相信观测):传感器噪声低、预测不确定性大时 → 观测修正权重大
- K → 0(相信预测):传感器噪声高时 → 少修正,主要靠运动模型
其中 $\mathbf{P}$ 是预测不确定性(越大 → K 越大 → 越信传感器),$\mathbf{R}$ 是传感器噪声(越大 → K 越小 → 越信预测)。下图展示了不确定性椭圆在预测→更新过程中的变化:

适用场景:已知地图、已知初始位置、低非线性系统。计算效率高,适合实时运行。
3.3 UKF 定位
与 EKF 的区别:EKF 用泰勒展开对非线性函数做一阶线性化近似,在高非线性系统中误差较大。UKF(Unscented Kalman Filter)则通过精心选取的Sigma 点集来近似非线性变换后的概率分布,无需求导,精度更高。
Sigma 点采样:从当前均值和协方差中提取 $2n+1$ 个 Sigma 点,通过非线性函数传播后,重新计算均值和协方差。
✅ 比 EKF 精度高,尤其适合运动模型非线性较强的场景 ❌ 计算量比 EKF 略大(约为 EKF 的 2–3 倍)
3.4 粒子滤波定位(Particle Filter)
直觉理解:用成千上万个”粒子”(每个粒子代表一个可能的位姿假设)来表示机器人位置的概率分布。每个粒子都根据运动模型移动(加入随机噪声),然后根据传感器观测给每个粒子打分(权重),越接近真实观测的粒子权重越高。最后通过重采样(Resampling)淘汰权重低的粒子,复制权重高的粒子。
AMCL(Adaptive Monte Carlo Localization):ROS 中广泛使用的粒子滤波定位包,支持自适应粒子数量(定位收敛后减少粒子节省计算)。
下图展示了 MCL 算法的三个核心阶段:

MCL 算法流程:
flowchart TD
INIT["初始化:\n均匀撒粒子\n(全局定位)\n或高斯分布\n(已知初始位姿)"]
MOTION["运动更新(采样)\n按运动模型移动每个粒子\n加入随机运动噪声"]
OBS["观测加权\n用传感器数据(激光/RGB-D)\n为每个粒子计算观测概率\nwt = p(zt | xt, map)"]
NORM["归一化\n所有粒子权重之和 = 1"]
RESAMP["重采样\n按权重有放回地采样 N 个粒子\n(低权重被淘汰,高权重被复制)"]
EST["位姿估计\n取权重最大粒子 / 加权均值"]
NEXT["下一时刻"]
INIT --> MOTION
MOTION --> OBS
OBS --> NORM
NORM --> RESAMP
RESAMP --> EST
EST --> NEXT
NEXT -->|新运动指令| MOTION
重采样细节:朴素随机重采样会引入粒子多样性损失(同一粒子被多次复制)。系统重采样(Systematic Resampling) 通过在 $[0, 1/N]$ 内取一个随机起点,然后均匀间隔采样 N 次,保证每个区间恰好采样一次,有效避免多样性损失,计算复杂度仍为 $O(N)$。
AMCL 自适应粒子数(KLD 采样):固定粒子数既浪费计算(定位收敛后粒子不需要那么多),又不安全(初始化时粒子太少可能漏掉真实位置)。KLD 采样 根据当前粒子集覆盖的状态空间体积,动态计算所需粒子数量:状态空间探索越充分(覆盖的网格越多),需要的粒子数越少。AMCL 中典型范围为 100–5000 个粒子。
✅ 支持全局定位(多假设并行,能处理绑架问题) ✅ 对非线性系统友好,不需要线性化 ❌ 粒子数量多时计算开销大 ❌ 在高维状态空间中效率下降(维度诅咒)
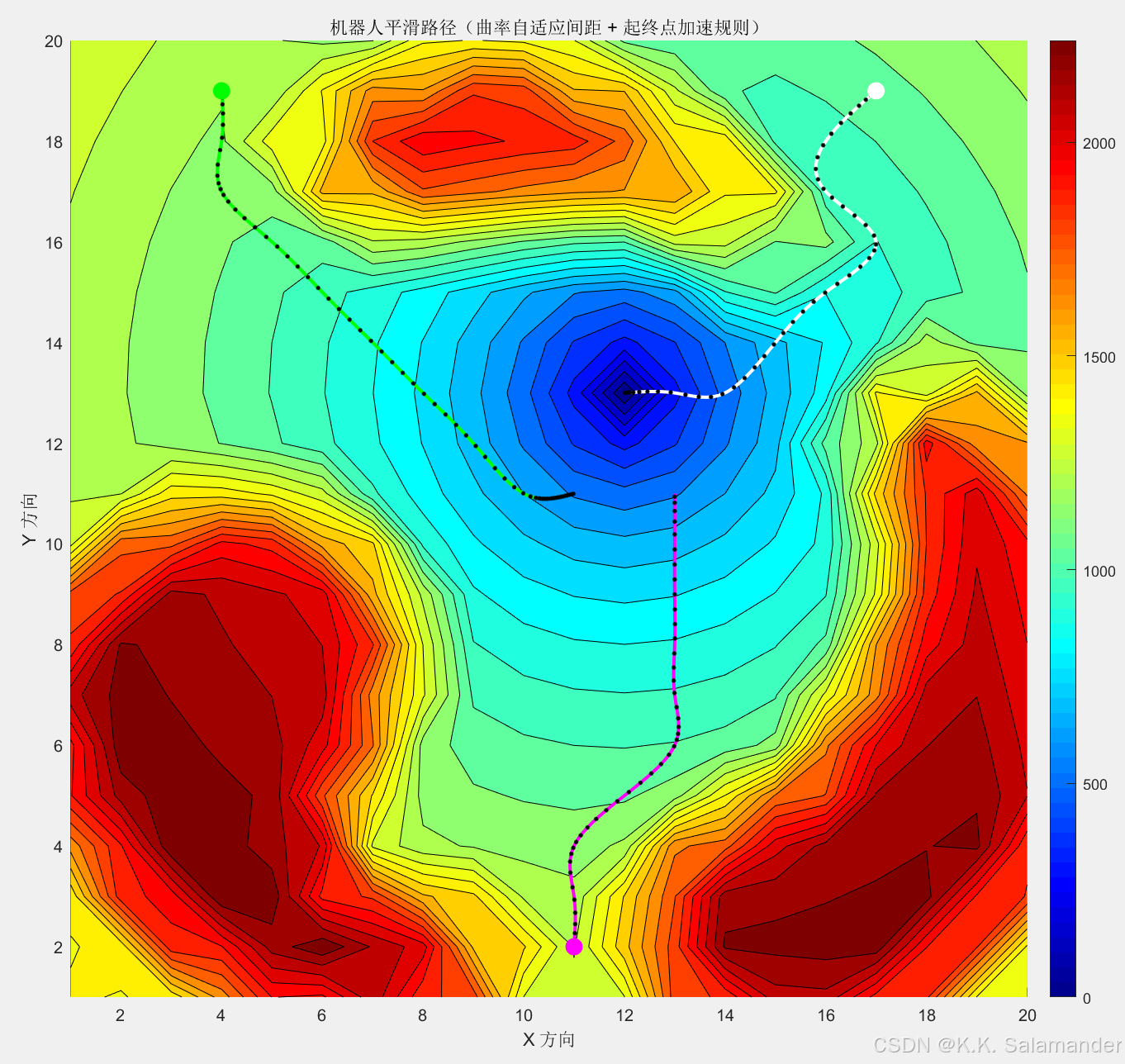
3.5 基于扫描匹配的定位
扫描匹配是另一类定位思路:直接将当前激光雷达扫描与参考地图(或上一帧扫描)对齐,求解位姿变换。
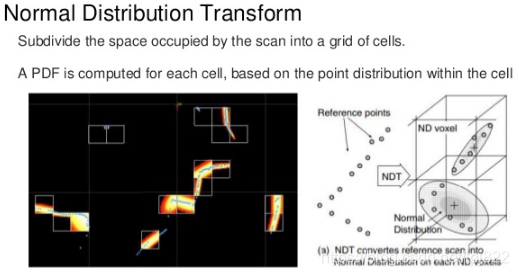
NDT(正态分布变换,Normal Distributions Transform)
思路:将参考点云空间划分为规则网格,每个格子内的点用正态分布(均值 + 协方差)来表示。当前扫描的点云在这些正态分布中的概率就是匹配得分,通过优化位姿使得匹配概率最大。
✅ 对点云密度变化鲁棒 ✅ 计算效率高(尤其是三维场景) ✅ 是自动驾驶定位(HDMap-based Localization)的主流方法之一
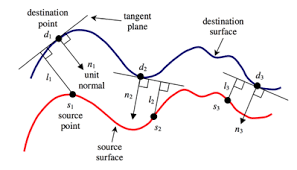
ICP(迭代最近点,Iterative Closest Point)
思路:将当前点云与目标点云中最近的点对匹配,计算最小化匹配点对距离的刚体变换(旋转 + 平移),然后迭代重复直到收敛。
✅ 简单直观,精度高(收敛后) ❌ 对初始位姿敏感,容易陷入局部最优 ❌ 计算复杂度较高,实时性受点云密度影响 ❌ 在重复结构(如走廊)中容易退化
3.6 定位方法对比汇总
| 方法 | 适用场景 | 全局定位 | 计算开销 | 非线性处理 | ROS 支持 |
|---|---|---|---|---|---|
| EKF | 已知初始位姿,低非线性 | ❌ | 低 | 一阶近似 | robot_localization |
| UKF | 已知初始位姿,中高非线性 | ❌ | 中 | Sigma点近似 | robot_localization |
| 粒子滤波/AMCL | 全局定位,未知初始位姿 | ✅ | 中–高 | 无近似 | amcl |
| NDT | 自动驾驶,高精地图定位 | 需初始化 | 中 | — | ndt_cpu |
| ICP | 精细配准,短距离匹配 | ❌ | 中–高 | — | pcl_ros |
4. 建图(Mapping & SLAM)
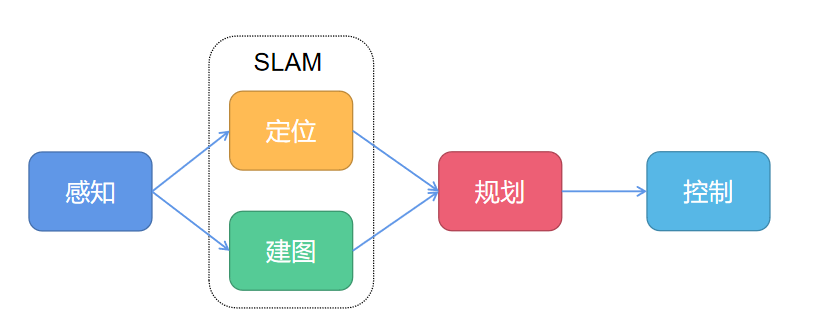
SLAM(同步定位与建图,Simultaneous Localization and Mapping) 解决了一个”先有鸡还是先有蛋”的问题:定位需要地图,建图又需要知道位置。SLAM 的目标是在没有先验地图的情况下,同时完成定位和建图。
4.1 地图表示形式
不同场景需要不同的地图表示:
二值占据栅格地图(Binary Occupancy Grid Map)
将环境空间划分为等大小的方格(通常 5–20 cm/格),每格存储一个概率值,表示该格是否被占据(有障碍 = 1,可通行 = 0,未探索 = 0.5)。这是室内机器人导航中最常用的地图格式,ROS map_server 直接支持。
代价地图(Costmap)
在占据栅格基础上,对障碍物周围区域膨胀(Inflation)出一层代价层:离障碍物越近,代价越高。这样路径规划时机器人会自动保持与障碍物的安全距离,无需额外碰撞检查。ROS Navigation Stack 的 costmap_2d 支持多层代价地图(静态层 + 障碍物层 + 膨胀层)。

势场地图(Potential Field Map)
将目标点视为”势能最低点”,障碍物视为”斥力源”,整个空间形成一个势能场。机器人沿梯度下降方向运动即可找到路径。直觉上类似于球在斜面上自然滚向最低点。主要缺点:容易陷入局部极小值(Local Minimum)。
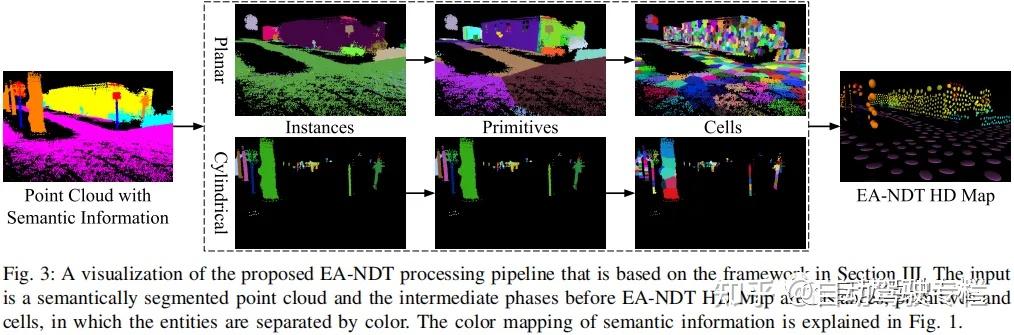
NDT 地图(NDT Map)
前文提到的正态分布变换地图,适合高精度自动驾驶场景。每个格子存储点云的统计分布,而非原始点,大幅压缩存储空间同时保持定位精度。
4.2 SLAM 问题概述
SLAM 的输入是传感器数据流(激光扫描序列 / 图像序列 + 里程计),输出是:
- 轨迹(Trajectory):机器人历史运动路径
- 地图(Map):环境的空间表示
SLAM 系统通常分为前端(Front-end) 和后端(Back-end) 两部分:
flowchart LR
subgraph Frontend["前端(数据关联)"]
A[传感器数据] --> B[特征提取\n扫描匹配]
B --> C[位姿初始估计\n里程计]
end
subgraph Backend["后端(优化)"]
C --> D[因子图构建]
D --> E[回环检测\nLoop Closure]
E --> F[图优化\ng2o / GTSAM]
end
F --> G[优化后轨迹\n+ 全局地图]
4.3 激光 SLAM
Cartographer(Google)
Google 开源的激光 SLAM 系统,支持 2D 和 3D 建图。核心思想:
- 子图(Submap):将扫描数据分段插入局部子图,每个子图维护自身的一致性
- 扫描匹配:新扫描来了,先用 CSM(相关扫描匹配)给一个初始位姿,再用 Ceres Solver 做精细优化
- 回环检测:当机器人回到之前探索区域时,通过暴力搜索匹配检测回环,消除累积误差
✅ 支持实时 2D/3D 建图
✅ 大规模室内场景效果优秀
✅ ROS 2 支持完善(cartographer_ros)
GMapping
基于粒子滤波的 2D 激光 SLAM,每个粒子维护一个独立的栅格地图和位姿估计。使用Rao-Blackwellized 粒子滤波,将 SLAM 问题分解为条件独立的定位和建图两部分。
✅ 实现简单,适合室内小场景 ✅ 实时性好 ❌ 大场景粒子数需求大,内存开销高 ❌ 不支持 3D 建图
LOAM(LiDAR Odometry and Mapping)
Ji Zhang 等人于 2014 年提出,是 3D 激光 SLAM 的里程碑工作。核心思路:
- 从点云中提取边缘线特征(Edge)和平面特征(Planar)
- 利用这两类特征做扫描匹配,估计帧间位姿
- 分离出高频里程计(Odometry)和低频建图(Mapping)两个线程并行运行

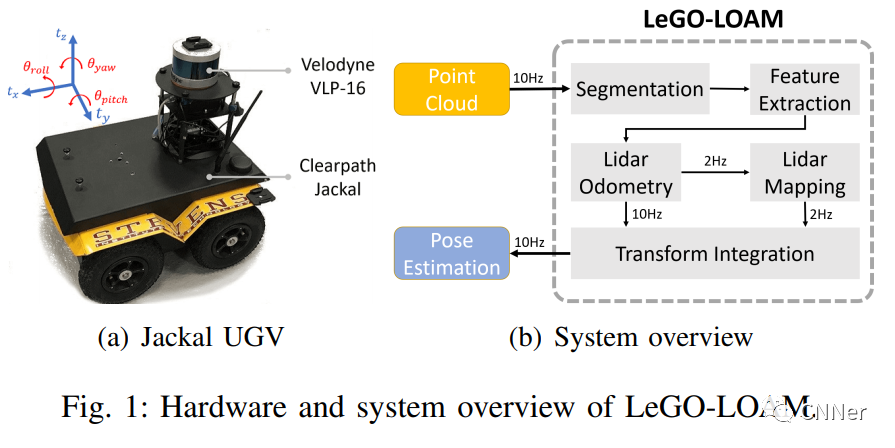
LeGO-LOAM
LOAM 的轻量化版本,专为地面移动机器人优化。利用地面分割,只使用地面点和非地面点中提取的特征,大幅降低计算量,可在嵌入式平台(如 Jetson)实时运行。
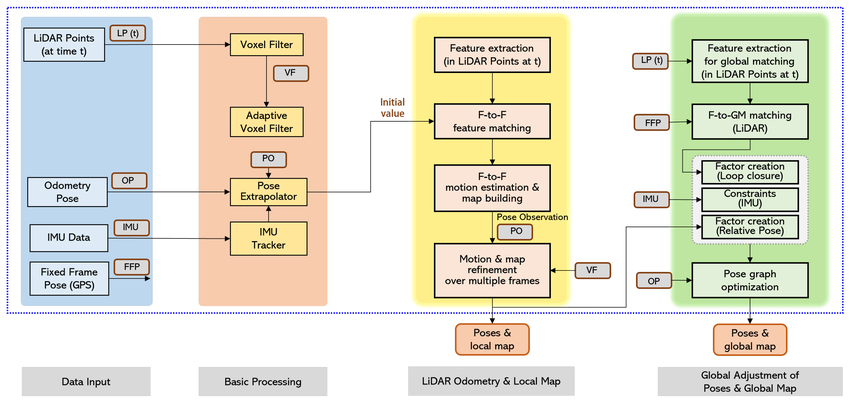
LIO-SAM
紧耦合激光惯性里程计,将 LiDAR 和 IMU 数据在因子图框架下联合优化。通过 IMU 预积分提供点云去畸变和初始位姿估计,再用激光匹配修正,精度和鲁棒性均优于松耦合方案。

LIO-SAM 紧耦合架构(IMU 预积分 + LiDAR 因子图):
flowchart LR
subgraph Input["输入数据"]
IMU2["IMU\n高频 ~200 Hz"]
LID2["3D LiDAR\n10–20 Hz"]
GPS2["GPS(可选)\n全局约束"]
end
subgraph Frontend2["前端"]
PREINT["IMU 预积分\n帧间姿态初值\n点云去畸变"]
FEAT["特征提取\n边缘线特征\n平面特征"]
SCAN["扫描匹配\n特征点→地图点\nLM 优化"]
end
subgraph Backend2["后端(GTSAM 因子图)"]
FG["因子图"]
IMUFac["IMU 预积分因子"]
LIDFac["LiDAR 里程计因子"]
GPSFac["GPS 因子(可选)"]
LOOP2["回环检测因子\nKd-tree 搜索"]
OPT2["iSAM2 增量优化"]
end
OUT2["优化后轨迹\n+ 全局点云地图"]
IMU2 --> PREINT
LID2 --> FEAT
PREINT --> SCAN
FEAT --> SCAN
GPS2 --> GPSFac
SCAN --> LIDFac
PREINT --> IMUFac
IMUFac --> FG
LIDFac --> FG
GPSFac --> FG
LOOP2 --> FG
FG --> OPT2
OPT2 --> OUT2
4.4 视觉 SLAM
视觉 SLAM 使用相机代替激光雷达,成本更低但对光照更敏感。
ORB-SLAM3
目前最成熟的视觉 SLAM 系统之一,支持单目 / 双目 / RGB-D / 鱼眼相机 + IMU。
关键技术:
- 特征提取:ORB(Oriented FAST and Rotated BRIEF) 描述子,快速且旋转不变
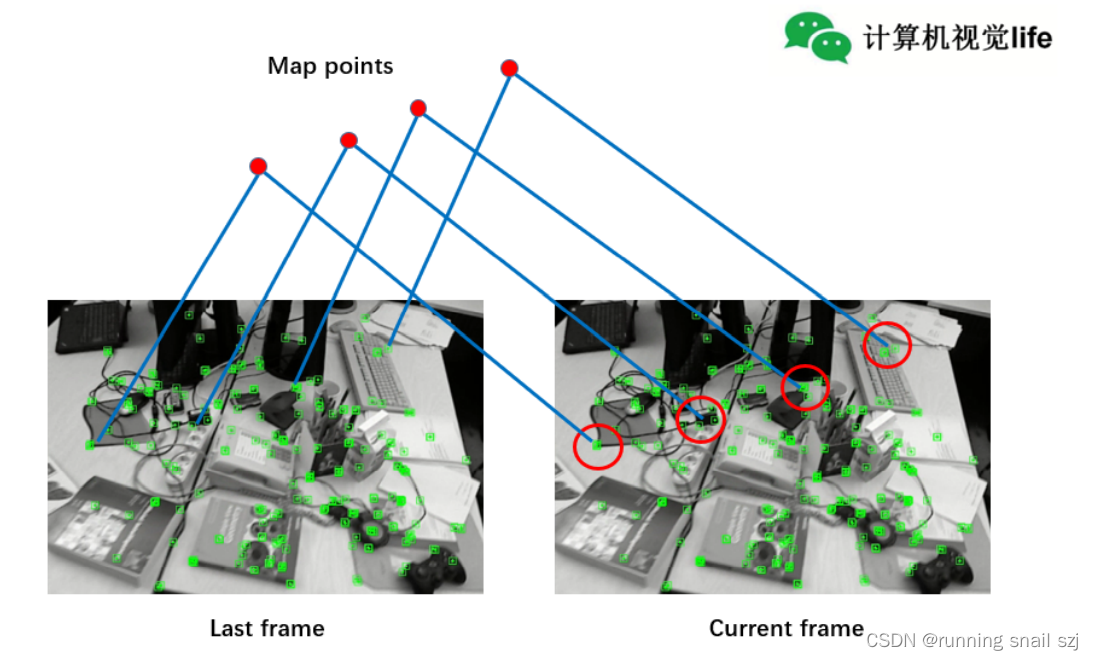
- 跟踪:当前帧与地图点匹配,用 PnP 求位姿
- 局部建图:维护一个局部地图,进行 Bundle Adjustment 优化
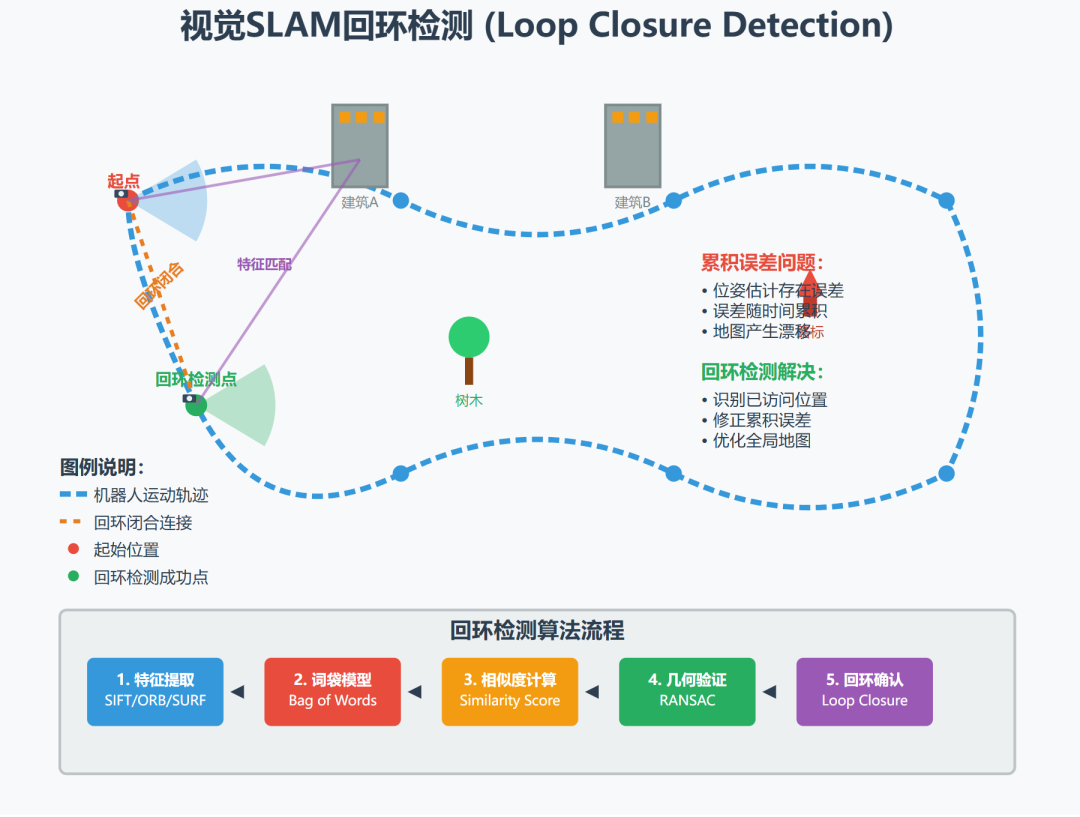
- 回环检测:基于词袋模型(Bag of Words, BoW) 的外观相似性检测
ORB-SLAM3 三线程架构:
flowchart TB
CAM["相机输入\n(单目/双目/RGB-D/鱼眼)"]
subgraph T1["线程①:Tracking(跟踪,实时)"]
ORB_EXT["ORB 特征提取"]
POSE_EST["位姿估计\n地图点匹配→PnP\n恒速模型初值"]
TRACK_ST{"跟踪成功?"}
RELOC["重定位\nBoW 检索候选帧\nPnP + RANSAC"]
end
subgraph T2["线程②:Local Mapping(局部建图,稍慢)"]
KF_INSERT["关键帧插入"]
MAP_PT["地图点三角化\n新地图点创建"]
LOCAL_BA["局部 Bundle Adjustment\n共视关键帧 + 地图点联合优化"]
KF_CULL["关键帧剔除\n90% 地图点被其他帧观测 → 删除冗余 KF"]
end
subgraph T3["线程③:Loop Closing(回环,更慢)"]
BOW_DETECT["BoW 回环检测\n相似帧候选"]
GEOM_VERIFY["几何一致性验证\nEssential Matrix 检验"]
LOOP_FUSE["回环融合\n地图点合并"]
GLOBAL_BA["全局 Bundle Adjustment\ng2o / 图优化"]
end
CAM --> ORB_EXT
ORB_EXT --> POSE_EST
POSE_EST --> TRACK_ST
TRACK_ST -->|"否"| RELOC
TRACK_ST -->|"是,且满足关键帧条件"| KF_INSERT
KF_INSERT --> MAP_PT
MAP_PT --> LOCAL_BA
LOCAL_BA --> KF_CULL
KF_INSERT --> BOW_DETECT
BOW_DETECT --> GEOM_VERIFY
GEOM_VERIFY --> LOOP_FUSE
LOOP_FUSE --> GLOBAL_BA
关键帧选择策略:ORB-SLAM3 不是每帧都插入关键帧,而是按以下条件触发:① 距上一关键帧时间超过阈值;② 当前帧可以观测到的地图点数量下降到阈值以下(跟踪变弱);③ 局部地图中不存在太多待处理的关键帧(避免积压)。这种策略确保关键帧在空间和时间上均匀分布,避免冗余。
地图点管理:每个地图点记录其被哪些关键帧观测到、在每帧中的 ORB 描述子(取均值作为代表描述子)。地图点分为局部地图点(近期关键帧所见)和全局地图点(完整历史)。跟踪时只使用局部地图点做匹配(速度快),BA 优化时只优化共视关键帧(局部 BA)。
丢失跟踪后的重定位:当连续帧跟踪失败时,系统进入重定位模式:① 用当前帧的 BoW 向量在关键帧数据库中检索相似帧;② 对候选帧用 PnP+RANSAC 验证几何一致性;③ 找到匹配帧后恢复位姿,重新初始化跟踪。BoW 检索速度极快(O(1) 量级),毫秒内可完成。
✅ 精度高,支持多种相机类型 ✅ 大规模场景中的闭环检测能力强 ❌ 纯视觉在弱光 / 快速运动下容易丢失跟踪
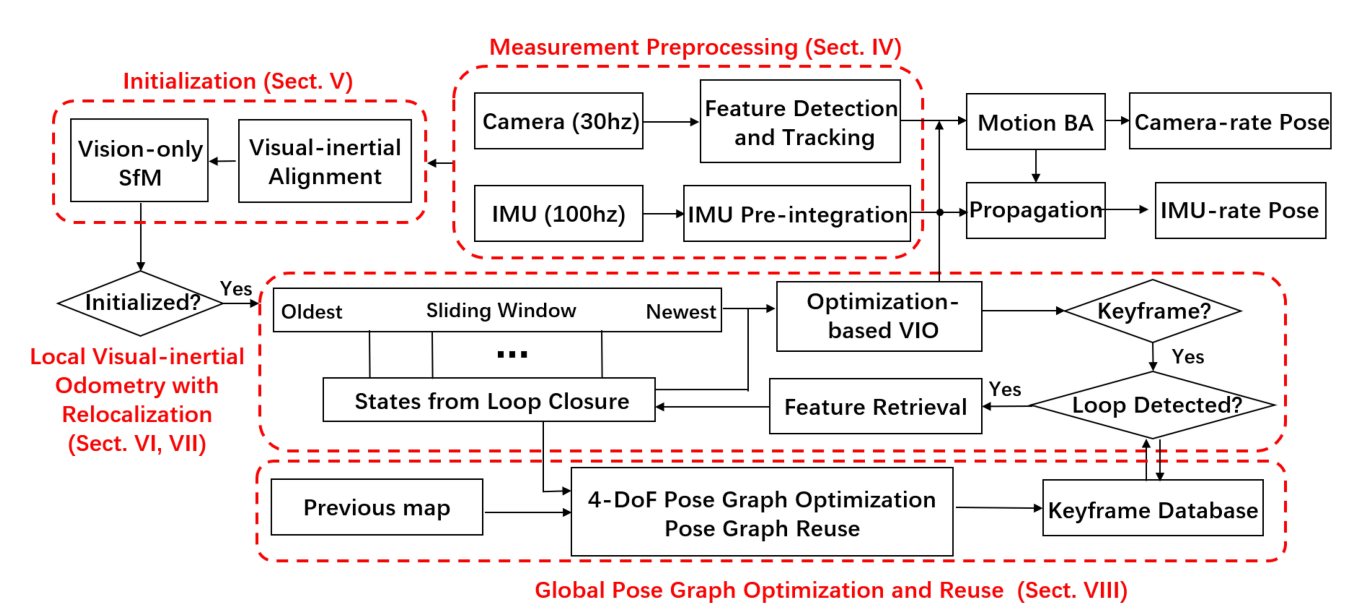
VINS-Mono / VINS-Fusion
| VINS-Mono | VINS-Fusion |
香港科技大学开源的视觉惯性 SLAM 系统。将相机和 IMU 紧耦合,通过非线性优化(滑动窗口 BA) 联合估计位姿。VINS-Fusion 进一步支持双目和 GPS 融合,是自动驾驶和无人机领域的常用方案。
✅ 紧耦合,精度高 ✅ 对相机纯旋转、弱纹理场景鲁棒性更好 ✅ 支持在线外参标定
DSO(直接稀疏里程计)
直接法代表作,不提取特征点,直接最小化图像像素灰度的光度误差(Photometric Error)。
与特征法(ORB-SLAM3)的对比:
| 对比维度 | 特征法(ORB-SLAM3) | 直接法(DSO) |
|---|---|---|
| 依赖纹理 | 需要角点特征 | 任意图像梯度 |
| 弱纹理场景 | ❌ 容易失败 | ✅ 相对更好 |
| 运动模糊 | ❌ 特征提取困难 | ❌ 也会退化 |
| 计算量 | 中等 | 较大 |
| 地图稠密度 | 稀疏点云 | 半稠密点云 |
RTAB-Map(Real-Time Appearance-Based Mapping)
由 IntRoLab 开源,是目前 ROS 生态中使用最广泛的多模态图优化 SLAM 系统,同时支持 RGB-D 相机、双目相机和 3D LiDAR 输入,输出占据栅格地图和稠密点云地图。
核心设计:基于外观的记忆管理
RTAB-Map 最独特之处在于其在线记忆管理机制(Memory Management):系统将关键帧分为”工作记忆(Working Memory, WM)”和”长期记忆(Long-Term Memory, LTM)”。当 WM 中的节点数超过上限,最久未被访问的节点被转入 LTM(类似操作系统的内存换页)。回环检测时只在 WM 内搜索,保证实时性;检测到回环后从 LTM 中唤醒相关节点参与优化。这一机制使 RTAB-Map 能在大规模长时间建图中保持实时(>1 Hz)运行。
关键技术模块:
- 外观回环检测:基于词袋模型(BoW)对关键帧提取 SURF/ORB 特征,计算帧间相似度;超过阈值则触发几何验证(PnP + RANSAC)
- 图优化后端:使用 g2o / GTSAM 对位姿图进行全局优化,消除累积漂移
- 多传感器前端:
- RGB-D 模式:ICP 点云匹配 + 视觉里程计(VO)
- 激光模式:ICP / NDT 扫描匹配
- 双目模式:视差深度估计 + VO
- 输出地图:2D 占据栅格地图(可直接用于 ROS Navigation Stack)+ 3D 彩色点云
flowchart LR
subgraph Input["输入"]
RGBD["RGB-D / 双目\n/ 3D LiDAR"]
IMU2["IMU(可选)"]
end
subgraph Frontend["前端:里程计"]
VO["视觉/激光里程计\nICP / VO"]
end
subgraph Memory["记忆管理"]
WM["工作记忆 WM\n(最近 N 帧关键帧)"]
LTM["长期记忆 LTM\n(历史关键帧,休眠)"]
WM <-->|"换入/换出"| LTM
end
subgraph Loop["回环检测"]
BOW2["BoW 相似度检索\n(仅 WM 内)"]
GEO["几何验证\nPnP + RANSAC"]
end
subgraph Backend["后端:图优化"]
PG["位姿图\ng2o / GTSAM"]
end
subgraph Output["输出地图"]
OCC["2D 占据栅格地图"]
PC["3D 彩色点云"]
end
RGBD --> VO
IMU2 --> VO
VO -->|"新关键帧"| WM
WM --> BOW2
BOW2 --> GEO
GEO -->|"回环约束"| PG
VO -->|"里程计约束"| PG
PG --> OCC
PG --> PC
✅ 多传感器支持,RGB-D/双目/LiDAR 一套系统通吃
✅ 输出标准占据栅格地图,与 ROS Navigation Stack 无缝对接
✅ 在线记忆管理,适合长时间大规模建图
✅ 内置 3D 点云地图,可用于抓取、三维重建等下游任务
❌ 默认参数对大场景内存消耗较高,需调优 Mem/STMSize 等参数
❌ 纯视觉模式在弱纹理 / 弱光环境下可靠性下降
4.5 SLAM 后端优化
SLAM 前端给出每帧的位姿初始估计,但由于噪声累积,长时间运行后误差会越来越大。后端优化的目标是全局一致性。
Bundle Adjustment(BA)直觉理解
Bundle Adjustment(光束平差法) 是视觉 SLAM 后端优化的核心,目标是同时调整相机位姿和三维地图点的位置,使所有地图点在所有相机帧中的重投影误差(Reprojection Error)最小。
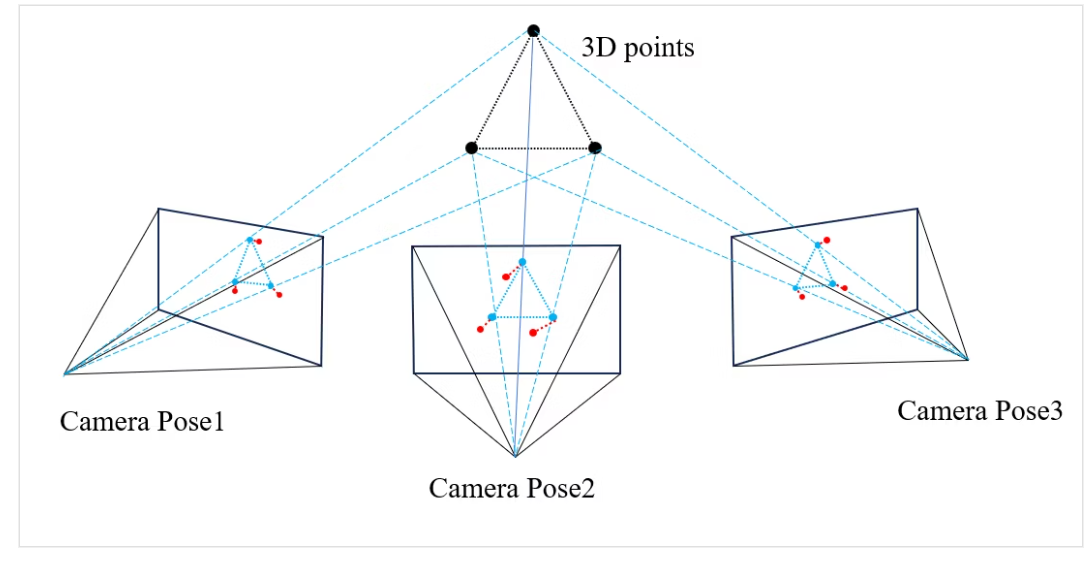
直觉类比:想象你有多张从不同角度拍摄同一场景的照片,以及场景中路标的初始3D坐标(有误差)。BA 就是同时微调每张照片的相机位置/朝向,以及每个路标的3D坐标,使得”按相机参数计算出来的路标投影点”与”实际在照片中看到的特征点位置”的偏差之和最小。
\[\min_{\{P_i\}, \{X_j\}} \sum_{i,j} \| u_{ij} - \pi(P_i, X_j) \|^2\]其中 $P_i$ 是相机位姿,$X_j$ 是地图点3D坐标,$u_{ij}$ 是观测到的图像坐标,$\pi(\cdot)$ 是投影函数。
Local BA vs. Global BA 的权衡:
- Local BA(ORB-SLAM3 实时优化):只优化最近的共视关键帧和它们观测到的地图点,计算量小,可实时运行(毫秒级)。缺点:全局漂移不能通过局部 BA 消除。
- Global BA(回环后触发):优化整个地图的所有关键帧和地图点,全局一致性好。缺点:计算量与地图规模成正比,大场景可能需要数秒甚至数分钟,只能离线或在回环检测触发后执行一次。
因子图(Factor Graph)与图优化
将 SLAM 问题建模为因子图:节点(变量)表示机器人位姿和地图点,边(因子)表示传感器约束(如相邻帧之间的相对位姿、回环约束)。求解过程就是找到使所有约束误差之和最小的变量估计值。
graph LR
X0((X0)) -->|里程计| X1((X1))
X1 -->|里程计| X2((X2))
X2 -->|里程计| X3((X3))
X3 -->|里程计| X4((X4))
X4 -->|回环检测| X0
X0 -->|GPS| G0[GPS因子]
X2 -->|LiDAR| L0[激光因子]
style X0 fill:#4a9,color:#fff
style X4 fill:#4a9,color:#fff
style G0 fill:#fa4,color:#fff
style L0 fill:#fa4,color:#fff
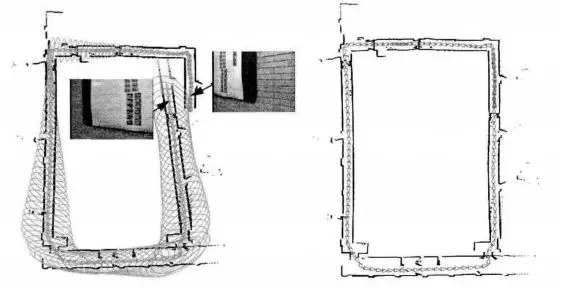
回环检测(Loop Closure Detection)
回环检测的任务:判断机器人是否回到了之前探索过的地方,从而添加回环约束消除累积误差。
- 基于外观(Appearance-based):词袋模型(BoW)、神经网络特征,比较图像相似度
- 基于几何(Geometry-based):扫描匹配验证候选回环的几何一致性
主要后端优化库
- g2o(General Graph Optimization):通用图优化库,ORB-SLAM2/3 使用
- GTSAM(Georgia Tech Smoothing and Mapping):因子图优化库,LIO-SAM 使用
- iSAM2(Incremental Smoothing and Mapping 2):GTSAM 中的增量式优化算法,支持实时更新而无需每次重新优化整个图
4.6 激光 vs. 视觉 SLAM 对比
| 对比维度 | 激光 SLAM | 视觉 SLAM |
|---|---|---|
| 传感器成本 | 高(数百至数万元) | 低 |
| 精度 | 高(cm 级) | 中(取决于场景) |
| 光照依赖 | 无 | 有(弱光/过曝困难) |
| 地图类型 | 点云/占据栅格 | 稀疏点云/半稠密 |
| 动态障碍处理 | 一般 | 较难 |
| 长廊退化问题 | 容易(缺少几何约束) | 依赖纹理 |
| 代表算法 | Cartographer, LIO-SAM | ORB-SLAM3, VINS-Mono |
| 典型应用 | 室内机器人, 自动驾驶 | 无人机, 手持设备 |
RTAB-Map 横跨两列:支持激光和视觉双模态输入,精度和适用场景介于两者之间,是 ROS 生态中覆盖面最广的开箱即用方案。
4.7 SLAM 退化场景与实际部署挑战
SLAM 系统在实验室环境下往往表现良好,但在真实部署中会遭遇各种退化场景,导致定位失败或地图错误。理解这些场景并有针对性地选择算法,是工程化的关键。

4.7.1 几何退化(Geometric Degeneracy)
长廊退化(Corridor Degeneracy):激光 SLAM 在长走廊中面临严峻挑战。走廊两侧墙壁高度对称,激光点云沿走廊方向的特征几乎一致,导致沿走廊方向的位移无法被约束(扫描匹配的法方向约束缺失)。表现为:沿走廊方向漂移,横向定位良好。
对策:
- 结合 IMU 或轮式里程计约束沿走廊方向运动
- 使用 3D LiDAR 利用天花板和地面结构补充约束
- LIO-SAM 的 IMU 预积分在退化方向提供约束
开阔室外退化:大型停车场、田野等缺少立体结构的环境,激光点云稀疏,NDT/ICP 收敛困难。对策:融合 GPS 全局约束。
4.7.2 动态环境挑战
SLAM 假设环境是静态的,但现实中行人、车辆、移动家具会产生动态干扰:
- 假地图点:动态障碍物被错误地建入静态地图
- 跟踪失败:大量动态物体导致扫描匹配失效
- 回环误检:场景布局变化后 BoW 召回错误关键帧
对策:
- 点云动态物体滤除(基于运动一致性检测)
- 语义分割过滤动态类别(行人、车辆)的点云
- 视觉 SLAM 中使用运动分割(Motion Segmentation)
4.7.3 光照与天气影响(视觉 SLAM)
视觉 SLAM 对光照极为敏感:
| 场景 | 对特征法的影响 | 对直接法的影响 |
|---|---|---|
| 弱光(夜间) | ORB 特征提取失败 | 光度误差计算不稳定 |
| 过曝(逆光) | 特征描述子不稳定 | 饱和区域梯度为零 |
| 快速运动 | 运动模糊,特征模糊 | 光流假设违反 |
| 下雨/雾 | 特征被遮挡 | 能见度下降 |
对策:
- 视觉惯性 SLAM(VINS-Mono/ORB-SLAM3 IMU 模式):IMU 在特征跟踪失败时维持短期定位
- HDR 相机或主动照明(结构光)适应光照变化
- 事件相机(Event Camera)对运动模糊免疫,是当前研究热点
4.7.4 长期地图维护与场景变化
长期部署面临地图老化问题:季节变化(落叶、积雪)、装修改造、家具移动等都会使原始地图失效。
对策策略:
- 增量式地图更新:当传感器观测与现有地图不一致超过阈值时,触发局部地图更新
- 多地图管理(ORB-SLAM3 支持):在场景切换或跟踪丢失时创建新子地图,恢复后合并
- 语义地图:用语义标签(门/墙/柱)替代原始点,语义特征比几何特征更稳定
4.7.5 嵌入式平台计算约束
机器人往往搭载算力有限的嵌入式平台(Jetson Nano / Xavier / Orin),而完整 SLAM 系统对算力要求较高:
| 组件 | CPU 算力需求 | GPU 加速可行性 |
|---|---|---|
| ORB 特征提取 | 中(SIMD 可加速) | ✅(CUDA ORB) |
| LiDAR 扫描匹配(NDT/ICP) | 高 | 部分(PCL GPU) |
| Bundle Adjustment | 极高 | ✅(g2o CUDA) |
| 回环检测(BoW 检索) | 低 | 不必要 |
| 粒子滤波(AMCL 500 粒子) | 低 | 不必要 |
实践建议:
- 优先使用轻量化系统:LeGO-LOAM(嵌入式友好)、AMCL(低算力定位)
- 前端(特征提取、扫描匹配)尽量在 GPU 加速
- 后端优化可降频运行(10 Hz 前端 + 1–2 Hz 后端 BA)
- 使用 iSAM2 增量优化避免全图重优化
注:视觉 SLAM 真实部署中的更多细节(与 TITS 2026 相关的场景适应性研究)将在后续补充。
4.8 常用数据集汇总
| 数据集 | 传感器 | 场景 | 主要用途 | 地址 |
|---|---|---|---|---|
| KITTI | 激光雷达+双目+GPS/IMU | 室外道路 | 视觉/激光里程计, 3D目标检测 | kitti.is.tue.mpg.de |
| TUM | RGB-D | 室内 | RGB-D SLAM 评测 | vision.in.tum.de |
| EuRoC | 双目+IMU | 室内无人机 | VIO 评测 | rpg.ifi.uzh.ch |
| nuScenes | 6相机+激光+雷达+GPS/IMU | 室外道路 | 自动驾驶感知 | nuscenes.org |
| Newer College | 3D激光+IMU | 室外校园 | 3D LiDAR SLAM | ori.ox.ac.uk |
| Hilti SLAM | 多激光+相机+IMU | 建筑工地 | 多传感器 SLAM 评测 | hilti-challenge.com |
5. 路径规划(Path Planning)
路径规划解决”我该怎么走”的问题:在已知(或局部已知)的地图中,找到从起点到终点的无碰撞路径。
5.1 全局路径规划——搜索类
搜索类算法在离散化的栅格地图上搜索最优路径。
Dijkstra 算法
思路:从起点出发,像涟漪扩散一样,按照代价从小到大的顺序逐步探索所有可达节点,直到找到终点。保证找到代价最小的路径(最优性)。
✅ 保证最优解 ❌ 无方向性,在大地图上扩展节点数量大,效率低 ❌ 时间复杂度 $O(V \log V + E)$,$V$ 为节点数,$E$ 为边数
A*(A-Star)算法
思路:在 Dijkstra 基础上加入启发函数 h(n)(估计当前节点到终点的代价,通常用欧几里得距离或曼哈顿距离),让搜索有明确的方向性,优先探索”看起来更接近终点”的节点。
\[f(n) = g(n) + h(n)\]其中 $g(n)$ 是起点到节点 $n$ 的实际代价,$h(n)$ 是启发函数估计值。
✅ 保证最优解(当 $h(n)$ 不高估实际代价时) ✅ 比 Dijkstra 快得多(方向性搜索) ❌ 在高维空间(如3D)计算量仍然较大
启发函数 h(n) 的选择:不同的启发函数适用于不同的移动约束:
| 启发函数 | 公式 | 适用场景 | 性质 |
|---|---|---|---|
| 曼哈顿距离 | $|dx| + |dy|$ | 只允许 4 方向移动(上下左右) | 4方向下恰好可采纳 |
| 欧几里得距离 | $\sqrt{dx^2 + dy^2}$ | 允许任意方向移动 | 任何情况下均可采纳 |
| Octile 距离 | $\max(|dx|,|dy|) + (\sqrt{2}-1)\min(|dx|,|dy|)$ | 允许 8 方向移动(含对角线) | 8方向下比欧氏更紧(搜索更快) |
可采纳(Admissible):$h(n)$ 永远不高估真实代价,保证 A* 找到最优解。若 $h(n) = 0$ 则退化为 Dijkstra(最慢最优),$h(n)$ 越大越快但可能过高估失去最优性。
下图展示了 A* 在 10×10 栅格上的搜索过程:

双向 A(Bidirectional A)
同时从起点和终点双向搜索,当两个搜索波前相遇时停止。平均搜索节点数约为单向 A* 的一半,适合起终点相距较远的情况。
Hybrid A(混合 A)
标准 A* 的问题:在栅格上寻路,忽略了车辆的运动学约束。一辆汽车不能原地侧移,它有最小转弯半径。
Hybrid A* 的改进:将车辆的连续状态空间($x, y, \theta$)离散化,每个节点扩展时考虑可执行的转向操作(如不同曲率的圆弧),确保生成的路径对非完整约束车辆(差速轮式/阿克曼)实际可行。
✅ 生成运动学可行路径 ✅ 适合停车场景、狭窄通道 ❌ 计算量比标准 A* 大 ❌ 需要结合 Reeds-Shepp 曲线等后处理平滑
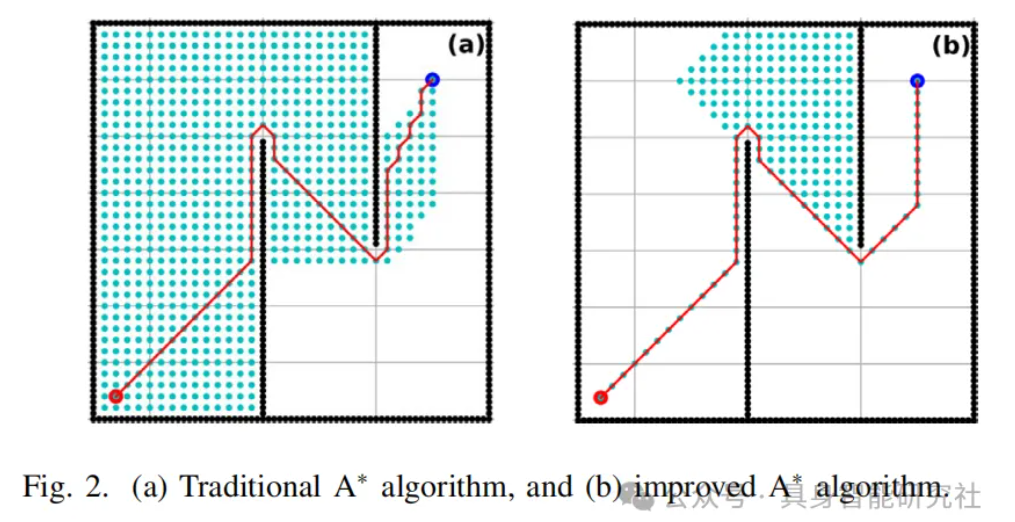
A* 算法工程优化
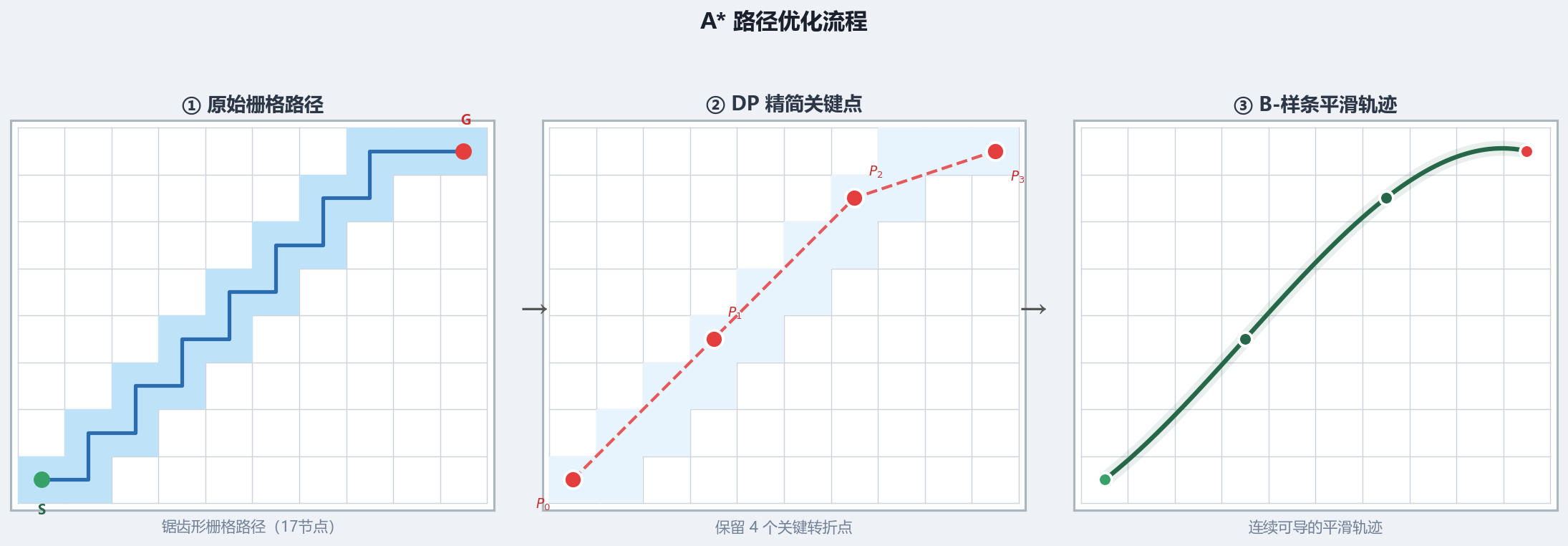
在实际工程落地(如自动驾驶或移动机器人)中,原始 A* 生成的路径往往存在节点冗余、拐角尖锐等问题。主流的优化策略包括:
-
自适应启发函数权重: 引入动态权重系数 $\lambda$,使启发函数随位置变化: \(f(n) = g(n) + (1 + \lambda \cdot \frac{d_{to\_end}}{d_{total}})h(n)\) 在靠近起点时增大权重以提升搜索速度(类似贪婪搜索);在靠近终点时降低权重以保证路径的最优性。
-
路径精简(Douglas-Peucker 算法): A* 产生的原始路径通常包含大量共线的冗余节点。利用 Douglas-Peucker (DP) 算法可以在保持路径拓扑特征的前提下,剔除不必要的中间点,极大地简化路径描述,提升后续轨迹平滑的效率。
-
二次平滑(B-样条曲线): 针对精简后的关键点,利用 B-样条(B-Spline) 或五次多项式进行拟合。这能将 A* 的折线路径转化为连续、高阶可导的平滑弧线,确保其符合底盘的动力学约束(如向心加速度限制)。
5.2 全局路径规划——采样类
采样类算法通过随机采样构建路径,不需要显式栅格化地图,适合高维空间和复杂几何约束场景。
RRT(快速随机扩展树,Rapidly-exploring Random Tree)
思路:从起点生长一棵树,每次随机采一个点,找到树上最近的节点,向随机点方向延伸一小步,如果没有碰撞就加入树。当树的某个节点足够接近终点时,路径即找到。
✅ 天然处理高维空间(机械臂规划) ✅ 不需要栅格化 ❌ 不保证最优性(找到的路径通常较曲折) ❌ 最终路径需要额外平滑处理
RRT*
RRT 的改进版,加入了重连(Rewiring) 步骤:每次加入新节点时,检查其邻近节点是否能通过新节点降低代价,如果能就重连。随着采样点增多,路径逐渐收敛到最优解(渐近最优)。
✅ 渐近最优性(采样越多路径越好) ❌ 收敛速度慢,实时规划时可能采样时间不够
双向 RRT(Bidirectional RRT)
从起点和终点同时生长两棵树,两棵树相遇时合并路径。收敛速度比单向 RRT* 快约一个数量级。
Informed RRT*
进一步改进:当找到一条初始解后,将采样限制在椭圆区域内(以起终点为焦点的椭圆,长轴等于当前最优路径长度)。这样所有后续采样点都有可能改善当前解,大幅提升收敛速度。
5.3 局部路径规划(动态避障)
全局规划假设地图是静态的,而现实中会有动态障碍物(行人、其他机器人)。局部规划在机器人运动过程中实时重新规划,处理动态障碍。
DWA(动态窗口法,Dynamic Window Approach)
思路:在机器人当前速度周围的可达速度窗口(受加速度限制)中采样速度指令 $(v, \omega)$,用运动模型预测每条轨迹,根据目标方向 + 速度 + 障碍物距离综合打分,选择最优速度指令执行。
\[G(v, \omega) = \sigma(\alpha \cdot \text{heading} + \beta \cdot \text{dist} + \gamma \cdot \text{velocity})\]✅ 计算快(ms 级),适合实时避障
✅ ROS dwa_local_planner 开箱即用
❌ 速度搜索空间有限,在狭窄通道中容易失败
❌ 只考虑短期轨迹,无法处理需要”绕路”的障碍
改进变体:模糊 DWA (Fuzzy DWA)
传统 DWA 的评价权重($\alpha, \beta, \gamma$)是固定的,难以兼顾“高速行驶”与“狭窄避障”。模糊 DWA 引入模糊推理机,以目标距离和最近障碍物距离为输入,动态调整采样权重。例如:当障碍物极近时,大幅提高 $\beta$(避障权重)并降低 $\gamma$(速度权重),使避障行为更丝滑、不生硬。
TEB(时间弹性带,Timed Elastic Band)
思路:将路径视为一段”橡皮筋”,加入时间维度后变成”时间弹性带”。将路径优化问题建模为多目标优化(最短路径 + 避障 + 运动学约束 + 时间一致性),通过迭代调整路径上的路点(Way Point)来得到平滑、无碰撞的轨迹。
✅ 生成平滑、运动学可行的轨迹 ✅ 支持动态障碍物 ✅ 支持倒车 ❌ 计算量比 DWA 大,约 50–200 ms ❌ 参数调优复杂
势场法(Potential Field Method)
最简单直观的局部避障方法:终点产生引力,障碍物产生斥力,机器人沿合力方向移动。
✅ 实现简单,计算极快 ❌ 局部极小值问题(机器人可能卡在引力和斥力平衡点) ❌ 狭窄通道中斥力可能过大导致无法通行
MPPI(模型预测路径积分)
模型预测路径积分(Model Predictive Path Integral)思路:属于模型预测控制(MPC) 的随机变体。在当前时刻,向前采样大量随机控制序列(通过 GPU 并行采样),用运动模型仿真每条轨迹的未来状态,根据轨迹代价(碰撞 + 偏离路径 + 控制平滑)计算加权平均作为当前控制输出,然后滑动时间窗口重复。
✅ 无需求解最优控制问题(只需前向仿真) ✅ 天然支持非线性系统和非凸代价函数 ✅ GPU 并行采样,可处理复杂障碍物分布 ❌ 需要相对精确的运动模型 ❌ 计算量较大,需要 GPU
5.4 代价地图(Costmap)层次结构
ROS costmap_2d 采用分层代价地图架构:
| 层名 | 功能 | 更新频率 |
|---|---|---|
| 静态层 | 读取 SLAM 生成的静态地图 | 低(一次性) |
| 障碍物层 | 订阅传感器数据(激光/点云),标记动态障碍 | 高(实时) |
| 膨胀层 | 对障碍物区域按机器人半径膨胀出代价梯度 | 随障碍物层更新 |
| 自定义层 | 用户可扩展(如禁止区域、语义标注等) | 自定义 |

inflation_radius 与机器人尺寸的关系:
膨胀层的核心参数 inflation_radius(膨胀半径)决定了障碍物周围代价梯度的扩展范围:
- 最小值:至少设为机器人半径($r_{robot}$),否则机器人可能与障碍物发生碰撞
- 推荐值:$r_{robot}$ + 安全余量(如 0.1–0.3 m),余量根据定位精度和机器人速度决定
- 过大的影响:狭窄通道被高代价区域填满,规划器无法找到路径(代价无限大路径不可通)
膨胀代价的计算公式(ROS costmap_2d):
其中 $d$ 是到最近障碍物的距离,$r_{inscribed}$ 是机器人的内切圆半径。cost_scaling_factor 越大,代价衰减越快(紧贴障碍物的代价梯度越陡)。
全局代价地图(Global Costmap):大范围,更新慢,用于全局规划 局部代价地图(Local Costmap):机器人周围小范围(如 5m),更新快,用于局部避障
5.5 规划算法对比汇总
| 算法 | 类型 | 最优性 | 完备性 | 计算速度 | 适用场景 |
|---|---|---|---|---|---|
| Dijkstra | 搜索(全局) | ✅ 最优 | ✅ | 慢 | 小规模栅格地图 |
| A* | 搜索(全局) | ✅ 最优 | ✅ | 中等 | 室内导航,自动驾驶 |
| Hybrid A* | 搜索(全局) | 近似 | ✅ | 中等 | 非完整约束车辆(自动驾驶停车) |
| RRT | 采样(全局) | ❌ | 概率完备 | 快 | 高维空间,机械臂 |
| RRT* | 采样(全局) | 渐近最优 | 概率完备 | 中等 | 高维空间 |
| DWA | 局部 | 局部最优 | ❌ | 极快 | 室内移动机器人实时避障 |
| TEB | 局部 | 局部最优 | ❌ | 中等 | 复杂局部环境,需平滑轨迹 |
| 势场法 | 局部 | ❌ | ❌ | 极快 | 简单场景,辅助引导 |
| MPPI | 采样(局部) | 渐近最优 | 概率完备 | 中等(GPU加速) | 非线性动力学,越野无人车,动态避障 |
6. 路径跟踪(Path Tracking)
路径规划给出了一条理想路径,而路径跟踪控制器的任务是让机器人实际跟随这条路径运动。由于真实世界存在噪声、模型误差和外界干扰,控制器需要实时计算修正量。
6.1 纯追踪控制
纯追踪控制(Pure Pursuit)直觉理解:想象你开车,目光盯着前方一个固定距离(预瞄距离 Look-ahead Distance $L_d$)的目标点,不断调整方向盘朝它转。这就是 Pure Pursuit 的思路。
核心公式:
\[\delta = \arctan\left(\frac{2L\sin\alpha}{L_d}\right)\]其中:
- $\delta$ = 前轮转角(控制量)
- $L$ = 轴距
- $\alpha$ = 目标点方向与车辆航向的夹角
- $L_d$ = 预瞄距离(通常取当前速度的 1–2 倍时间内行驶的距离)

✅ 实现极其简单 ✅ 对路径噪声鲁棒(天然平滑效果) ❌ 预瞄距离需要人工调参 ❌ 高速时跟踪误差大(纯几何控制,忽略动力学)
预瞄距离 $L_d$ 调参实践建议:
$L_d$ 是 Pure Pursuit 唯一需要调的关键参数,对性能影响极大:
| $L_d$ 设置 | 行为特点 | 适用场景 |
|---|---|---|
| 太小(< 0.5m @ 1m/s) | 转向过于激进,频繁震荡 | — |
| 适中 | 平滑跟踪,轻微路径误差 | 一般导航 |
| 太大(> 3m @ 1m/s) | 走”大弯”切角,直道效果好但转弯误差大 | 高速直道 |
速度自适应调参(Adaptive Pure Pursuit):使用 $L_d = k \cdot v$,其中典型 $k$ 值为:
- 室内机器人(最高 1 m/s):$k \approx 1.5$–$2.0$
- 仓储 AGV(最高 2 m/s):$k \approx 1.0$–$1.5$
- 自动驾驶(最高 30 km/h):$k \approx 0.5$–$1.0$
另一实践技巧:设置 $L_d$ 的最小值(如 0.3 m),避免低速时预瞄距离趋近于零导致震荡。
6.2 自适应追踪控制
自适应追踪控制(Adaptive Pure Pursuit)将预瞄距离 $L_d$ 与速度动态关联:
\[L_d = k \cdot v\]其中 $k$ 是比例系数,$v$ 是当前速度。速度快时预瞄远(稳定),速度慢时预瞄近(精确)。这解决了固定预瞄距离在不同速度下表现差异大的问题。
6.3 后轮反馈控制
后轮反馈控制(Rear Wheel Feedback)以车辆后轴中点为跟踪参考点(而非前轴或重心),直接消除后轮在参考路径上的横向误差和航向误差。后轮反馈控制(Rear Wheel Feedback)相比 Pure Pursuit 有更严格的数学收敛保证。
6.4 Stanley 控制器
斯坦福大学自动驾驶团队(用于 DARPA 挑战赛)提出的控制律,以前轴中点为参考:
\[\delta = \psi_e + \arctan\left(\frac{k \cdot e}{v}\right)\]其中:
- $\psi_e$ = 航向误差
- $e$ = 前轴到路径的横向偏差
- $k$ = 增益系数
- $v$ = 当前速度
第一项修正航向偏差,第二项修正横向偏差。速度越快,横向误差修正量越小(避免高速急转)。
✅ 精度优于 Pure Pursuit ✅ 低速(停车)时的精度表现好 ❌ 在极低速时 $\arctan(k \cdot e / v)$ 项趋于饱和,需要处理 ❌ 不显式考虑路径曲率
6.5 路径跟踪算法对比汇总
| 控制器 | 跟踪精度 | 计算量 | 参数数量 | 适用速度 | 典型应用 |
|---|---|---|---|---|---|
| Pure Pursuit | 低–中 | 极低 | 1($L_d$) | 低–中 | 简单室内机器人 |
| Adaptive Pure Pursuit | 中 | 极低 | 1($k$) | 全速域 | 一般移动机器人 |
| Stanley | 中–高 | 低 | 1($k$) | 低–高 | 自动驾驶 |
| 后轮反馈 | 中–高 | 低 | 少 | 全速域 | 差速轮式机器人 |
7. 运动控制(Motion Control)
路径跟踪(第6章)解决的是”朝哪个方向走”的几何问题,而运动控制解决的是”如何精确执行这些指令”的动态问题——需要考虑系统模型、物理约束、扰动抑制和最优性。本章介绍机器人导航中常用的模型化控制方法。
7.1 PID 控制
PID(比例-积分-微分,Proportional-Integral-Derivative)是工程中应用最广泛的控制器,也是理解更复杂控制算法的基础。
控制律:
\[u(t) = K_p e(t) + K_i \int_0^t e(\tau)\,d\tau + K_d \frac{de(t)}{dt}\]其中 $e(t)$ 是误差(如横向偏差或航向误差),三项分别:
- P(比例):当前误差越大,修正力度越大;响应快但可能超调
- I(积分):消除稳态误差(积累历史误差);过大会振荡
- D(微分):预测误差变化趋势,抑制超调;对噪声敏感
离散形式(实际代码中使用):
\[u_k = K_p e_k + K_i \sum_{j=0}^{k} e_j \Delta t + K_d \frac{e_k - e_{k-1}}{\Delta t}\]✅ 实现简单,调参直观 ✅ 不需要系统模型(纯经验调参) ❌ 参数固定,难以适应非线性和时变系统 ❌ 无法显式处理约束(如最大转速、最大转向角)
7.2 LQR 路径跟踪
线性二次调节器(Linear Quadratic Regulator)将路径跟踪问题建模为最优控制问题。在车辆线性化模型下,LQR 求解最小化如下代价函数的最优控制律:
\[J = \sum_{t=0}^{\infty} \left( \mathbf{e}_t^T \mathbf{Q} \mathbf{e}_t + u_t^T \mathbf{R} u_t \right)\]其中 $\mathbf{e}_t$ 是跟踪误差(横向偏差 + 航向误差),$u_t$ 是控制输入(转向角),$\mathbf{Q}$ 和 $\mathbf{R}$ 是权重矩阵(调参关键:$\mathbf{Q}$ 大表示”更重视减小误差”,$\mathbf{R}$ 大表示”更重视平稳控制”)。
✅ 理论上最优,精度高 ✅ 系统响应平滑 ❌ 依赖精确的线性化模型 ❌ $\mathbf{Q}$、$\mathbf{R}$ 矩阵调参需要经验
7.3 MPC(模型预测控制,Model Predictive Control)
MPC 是目前自动驾驶和高精度机器人控制中最受关注的方法之一。核心思想:在每个控制周期内,基于当前状态和系统模型,求解一个有限时域优化问题,输出一段最优控制序列,但只执行第一步,然后在下一周期重新求解——即”滚动优化、反馈校正“。
优化问题形式:
\[\min_{u_0, \ldots, u_{N-1}} \sum_{k=0}^{N-1} \left( \mathbf{x}_k^T \mathbf{Q} \mathbf{x}_k + u_k^T \mathbf{R} u_k \right) + \mathbf{x}_N^T \mathbf{P} \mathbf{x}_N\] \[\text{s.t.} \quad \mathbf{x}_{k+1} = f(\mathbf{x}_k, u_k), \quad \mathbf{x}_k \in \mathcal{X}, \quad u_k \in \mathcal{U}\]其中:
- $N$ = 预测时域(Prediction Horizon),典型值 10–30 步
- $\mathbf{x}_k$ = 状态向量(位置、速度、航向等)
- $u_k$ = 控制输入(加速度、转向角)
- $\mathcal{X}, \mathcal{U}$ = 状态约束和控制约束(如最大速度、最大转向角)
- $\mathbf{P}$ = 终端代价矩阵(保证稳定性)
MPC 的关键优势:
✅ 显式处理约束:可直接在优化中加入速度上限、加速度限制等物理约束 ✅ 多步前瞻:通过预测未来 $N$ 步状态,在弯道前提前减速 ✅ 统一框架:路径跟踪、速度规划、软避障可同时在一个问题中处理 ❌ 计算量大,实时性要求高(需要高效 QP/NLP 求解器) ❌ 依赖精确的系统模型,模型失配会影响性能 ❌ 调参复杂($N$、$\mathbf{Q}$、$\mathbf{R}$、约束边界)
线性 MPC vs. 非线性 MPC(NMPC):
| 类型 | 模型 | 求解器 | 计算量 | 典型场景 |
|---|---|---|---|---|
| 线性 MPC | 线性化运动学模型 | QP(OSQP) | 中 | 低速 AGV、移动机器人 |
| 非线性 MPC | 完整非线性模型 | NLP(CasADi+IPOPT) | 高 | 高速自动驾驶、无人机 |
7.4 模糊 PID 控制(Fuzzy PID)
在传统的 PID 控制基础上引入模糊推理机,实现 $K_p, K_i, K_d$ 参数的在线自整定。系统以横向/航向误差及误差变化率为输入,根据预设的模糊规则表实时修正参数。
✅ 鲁棒性强:在处理非线性扰动和模型不确定性时,比传统 PID 更稳定,无超调 ✅ 计算高效:计算开销远小于 MPC,非常适合算力受限的嵌入式平台 ❌ 依赖模糊规则的人工设计,缺乏 LQR 那样的严格最优性证明
7.5 控制器对比汇总
| 控制器 | 需要模型 | 处理约束 | 计算量 | 精度 | 典型应用 |
|---|---|---|---|---|---|
| PID | 否 | 否 | 极低 | 中 | 嵌入式底盘、简单场景 |
| 模糊 PID | 否 | 否 | 低 | 中–高 | 非线性扰动、嵌入式平台 |
| LQR | 是(线性) | 否(软约束) | 中 | 高 | 高精度路径跟踪 |
| 线性 MPC | 是(线性) | 是 | 中–高 | 高 | 低速机器人、AGV |
| 非线性 MPC | 是(非线性) | 是 | 高 | 极高 | 高速自动驾驶、无人机 |
8. 完整导航栈集成
8.1 ROS Navigation Stack 架构
ROS 1 的 move_base 提供了一套经典的导航栈集成方案:
flowchart TB
subgraph MoveBase["move_base"]
GM[全局规划器\nGlobal Planner\nNavfn / GlobalPlanner] --> GCM[全局代价地图\nGlobal Costmap]
LM[局部规划器\nLocal Planner\nDWA / TEB] --> LCM[局部代价地图\nLocal Costmap]
GM -->|全局路径| LM
LM -->|速度指令 cmd_vel| VEL
end
GOAL[/目标位姿 goal/] --> MoveBase
MAP[/静态地图 map/] --> GCM
MAP --> LCM
SCAN[/激光雷达 scan/] --> GCM
SCAN --> LCM
ODOM[/里程计 odom/] --> MoveBase
VEL[/cmd_vel/] --> Robot[机器人底盘]
AMCL[AMCL 定位] --> MoveBase
典型话题接口:
| 话题 | 方向 | 说明 |
|---|---|---|
/move_base/goal |
输入 | 导航目标位姿 |
/map |
输入 | 静态地图 |
/scan |
输入 | 激光雷达数据 |
/odom |
输入 | 里程计 |
/amcl_pose |
输入 | 定位结果 |
/cmd_vel |
输出 | 速度指令(线速度 + 角速度) |
8.2 Nav2(ROS 2)架构
Nav2 是 ROS 2 的导航栈,相比 move_base 有以下重要改进:
- 行为树(Behavior Tree) 替代状态机:导航行为(规划、恢复、重试)用 BT 灵活配置
- 生命周期节点(Lifecycle Nodes):支持优雅的启动/停止管理
- 插件化架构:全局规划器、局部规划器、恢复行为均可作为插件替换
- Smac Planner:Nav2 内置的改进规划器,支持 Hybrid A* 和 State Lattice
flowchart TB
BT[行为树\nBehavior Tree] --> NP[Nav2 Planner\nServer]
BT --> NC[Nav2 Controller\nServer]
BT --> NR[Nav2 Recovery\nServer]
NP --> GCM2[全局代价地图]
NC --> LCM2[局部代价地图]
NC -->|cmd_vel| Base[机器人底盘]
NR -->|恢复行为\n旋转/后退| Base
8.3 参数调优要点
导航栈的调优是一个迭代过程,以下是几个关键参数:
代价地图:
inflation_radius:障碍物膨胀半径,设为机器人半径 + 安全余量cost_scaling_factor:代价衰减速率,越大则”紧贴障碍物”的代价越高
全局规划(A*):
default_tolerance:允许终点偏差,解决终点在障碍物上的问题
局部规划(DWA):
max_vel_x、max_rot_vel:速度上限,根据机器人能力设置sim_time:轨迹仿真时间,越长越”有预见性”但计算量越大path_distance_bias/goal_distance_bias:路径偏好 vs 终点偏好的权衡
9. 传统导航 vs. 端到端深度学习导航
| 对比维度 | 传统导航栈(SLAM+A*+DWA) | 端到端深度学习(VLN/VLA) |
|---|---|---|
| 地图依赖 | 需要预建地图(或实时 SLAM) | 无需先验地图 |
| 指令形式 | 坐标目标点(x, y, θ) | 自然语言(”去厨房”) |
| 泛化能力 | 弱(换环境需重新建图) | 强(跨场景泛化) |
| 可解释性 | ✅ 强(每个模块可追溯) | ❌ 弱(黑盒网络) |
| 计算资源 | 可在 CPU 运行 | 需要 GPU |
| 动态场景 | 局部规划处理(DWA/TEB) | 隐式学习(依赖训练数据) |
| 安全性保证 | ✅ 碰撞检测显式可控 | ❌ 安全边界难以保证 |
| 常识推理 | ❌ 无(纯几何) | ✅ 支持(如 LLM 推理) |
| 开发调试 | 各模块独立调试 | 端到端训练,难定位问题 |
| 长期稳定性 | ✅ 行为确定性强 | ❌ 分布外场景可能失效 |
| 典型代表 | ROS Nav Stack, Nav2 | VLN-BERT, NavGPT, VoxPoser |
实践建议:
- 工厂、仓储、医疗等结构化、安全要求高的场景 → 传统导航栈
- 家庭服务、跟随导览等非结构化、需理解自然语言的场景 → 学习型导航
- 混合架构正成为趋势:用传统导航栈处理底层安全和精准控制,用 VLM/LLM 处理高层语义理解和任务分解
10. 常用开源工具与框架汇总
传感器驱动与处理
| 工具 | 功能 | 链接 |
|---|---|---|
| PCL(Point Cloud Library) | 点云处理算法库(滤波、分割、匹配、特征) | pcl.org |
| Open3D | 点云和 3D 数据处理,Python 友好 | open3d.org |
| OpenCV | 图像处理和特征提取 | opencv.org |
定位
| 工具 | 功能 | ROS 包 |
|---|---|---|
| robot_localization | EKF / UKF 多传感器融合 | robot_localization |
| AMCL | 粒子滤波自适应蒙特卡洛定位 | amcl |
| NDT_CPU | NDT 扫描匹配 | ndt_cpu |
SLAM
| 工具 | 类型 | 特点 |
|---|---|---|
| Cartographer | 激光 2D/3D | Google 出品,生产可用 |
| GMapping | 激光 2D | 轻量,室内适用 |
| LIO-SAM | 激光+IMU | 高精度,GTSAM 后端 |
| LOAM / LeGO-LOAM | 激光 3D | 经典,地面机器人优化版 |
| ORB-SLAM3 | 视觉+IMU | 支持多种相机,精度高 |
| VINS-Mono/Fusion | 视觉+IMU | 无人机/手机导航 |
| RTAB-Map | RGB-D/双目/激光 | 多模态,ROS 开箱即用,内置记忆管理 |
| hdl_graph_slam | 激光 3D | 图优化,支持 NDT/ICP |
路径规划
| 工具 | 功能 |
|---|---|
| OMPL(Open Motion Planning Library) | 采样类规划算法库(RRT, PRM等) |
| Moveit! | 机械臂运动规划(集成 OMPL) |
| NavFn / GlobalPlanner | ROS 全局规划(Dijkstra/A*) |
| DWA Local Planner | ROS 动态窗口法局部规划 |
| TEB Local Planner | ROS 时间弹性带局部规划 |
| Smac Planner | Nav2 内置 Hybrid A* 规划器 |
仿真
| 工具 | 功能 |
|---|---|
| Gazebo | ROS 默认物理仿真器,支持传感器仿真 |
| Isaac Sim(NVIDIA) | GPU 加速光线追踪仿真,合成数据生成 |
| CARLA | 自动驾驶专用仿真器,城市场景 |
| Webots | 跨平台开源机器人仿真 |
11. 小结与展望
本文回顾
本文系统梳理了传统机器人导航算法栈的五大核心模块:
- 感知:激光雷达 / 相机 / IMU 各有优劣,传感器融合(EKF/UKF)是提高鲁棒性的关键
- 定位:EKF/UKF 适合实时位姿跟踪,粒子滤波(AMCL)支持全局定位,NDT/ICP 提供精确扫描匹配
- 建图/SLAM:激光 SLAM(Cartographer、LIO-SAM)精度高、全天候可用;视觉 SLAM(ORB-SLAM3、VINS-Mono)成本低但对光照敏感;RTAB-Map 横跨多模态、开箱即用;因子图后端优化是当前主流
- 路径规划:A* / Hybrid A* 用于全局规划,DWA / TEB 用于局部动态避障,代价地图是两者的”共同语言”
- 路径跟踪:Pure Pursuit / Stanley 是几何方法,实现简单,适合低速场景
- 运动控制:PID 是基础,LQR 提供最优线性控制,MPC 可显式处理约束与多步前瞻,模糊 PID 在非线性扰动下鲁棒性更强
展望
传统导航算法栈经过数十年发展已相当成熟,但仍面临挑战:
- 长廊退化、动态场景、非结构化地形:对 SLAM 鲁棒性提出更高要求
- 多机器人协同 SLAM:分布式建图与通信效率的权衡
- 语义理解缺失:传统算法缺乏”这是厨房”的语义能力,限制了在日常服务场景的应用
当前研究趋势是“传统导航 + 大模型”的混合架构:保留传统导航栈的安全性和可靠性,在任务规划和语义理解层引入 LLM/VLM,构建能够理解人类意图、在复杂现实世界中自主行动的下一代机器人系统。
参考资料:Thrun et al. “Probabilistic Robotics” (2005);LaValle “Planning Algorithms” (2006);ROS Navigation Wiki;Cartographer Paper (ICRA 2016);LIO-SAM (IROS 2020);ORB-SLAM3 (T-RO 2021);VINS-Mono (T-RO 2018);Hybrid A (IJRR 2010);TEB Local Planner (IROS 2013)*;http://www.autolabor.cn/usedoc/m1/navigationKit/development/slamintro; https://github.com/ShisatoYano/AutonomousVehicleControlBeginnersGuide;具身智能研究社;