1. 引言
深度学习(Deep Learning)是以多层神经网络为核心的机器学习方法,自 2012 年 AlexNet 在 ImageNet 挑战赛上以巨大优势击败传统方法以来,深度学习席卷了计算机视觉、自然语言处理、语音识别等几乎所有人工智能领域。今天,GPT、BERT、Stable Diffusion、AlphaFold 等划时代系统,无一不建立在深度学习的基础之上。
深度学习之所以强大,在于它能够从原始数据(像素、词语、信号)中自动学习多层次的抽象特征表示,无需人工设计特征工程。然而,训练一个高性能的深层网络并非易事——梯度消失、过拟合、学习率调节等问题长期困扰着研究者,由此催生了一整套系统性的训练技巧。
理解深度学习,需要同时把握两个层面:架构设计(网络如何搭建)和训练方法(网络如何有效优化)。两者缺一不可。只知道搭积木式地堆叠网络层,而不理解每个训练技巧解决的是什么问题,往往会陷入”加了 Dropout 反而更差”或”换了 Adam 没有任何改善”的困境。
本文旨在系统梳理深度学习的核心原理与关键技术进展,为学习和研究深度学习提供参考。全文按以下脉络展开:
- §2–3 基础:机器学习三步骤框架、神经元与反向传播
- §4 架构:MLP → CNN → RNN/LSTM → Transformer 的演进主线,并补充图神经网络(GNN)
- §5 训练优化:优化器、学习率调度、初始化、归一化、残差连接
- §6 损失与正则化:各类 Loss 的选型、Dropout、数据增强、AdamW
- §7 方法分类汇总:将所有技巧映射到”三步骤 × 两目标”坐标系
- §8 基准:MNIST / CIFAR / ImageNet / GLUE / MMLU / HumanEval / 长上下文等经典评测
- §9 高效训练与推理:混合精度、梯度裁剪/检查点、Flash Attention 等工程级优化技术
- §10 模型压缩与适配:MoE、LoRA/PEFT、量化、知识蒸馏等部署向轻量化方法
- §11 前沿架构与大模型:RLHF、生成模型(AE/VAE/GAN)、扩散模型、Mamba/SSM、LLM 等近年重大范式
2. 深度学习基础概述
2.1 什么是深度学习?
深度学习是机器学习的一个分支,以人工神经网络(Artificial Neural Network,ANN)为基本模型。”深度”指网络的层数多(通常超过 3 层),多层堆叠使网络能够逐层提取越来越抽象的特征。
一个神经网络的基本运算单元是神经元(Neuron):
\[a = f\left(\sum_i w_i x_i + b\right)\]其中 $x_i$ 是输入,$w_i$ 是权重,$b$ 是偏置,$f$ 是激活函数(Activation Function)。多个神经元堆叠成层(Layer),多层串联成深层网络,最终构成一个从输入到输出的复杂映射函数。

通用近似定理(Universal Approximation Theorem)
神经网络能处理一切任务的理论基石是 通用近似定理(Cybenko 1989、Hornik 1991):
只要隐藏层神经元数量足够多,一个单隐层前馈网络(配合任意非多项式激活函数)就能以任意精度逼近定义在紧集上的任意连续函数。
这一结论回答了”神经网络为什么能 work”的根本问题,但也有两层关键的限制必须澄清:
| 限制 | 含义 |
|---|---|
| 只保证存在性 | 定理只说”存在一组参数可以逼近”,不保证 SGD 能学到这组参数 |
| 宽度可能指数级增长 | 单隐层达到目标精度可能需要指数级神经元;加深比”加宽”更有效 |
| 只保证拟合,不保证泛化 | 训练集上完美拟合不等于验证集上表现好 — 这正是 Generalization 问题的由来 |
深度的优势:理论上(Telgarsky 2016)存在一类函数,深层网络用 $O(n)$ 个神经元即可表达,单隐层网络则需要 $O(2^n)$ 个神经元。宽是够用的,深是高效的——这是现代网络动辄几十上百层的理论动机。
深度学习爆发的三大驱动因素
| 因素 | 内容 | 代表事件 |
|---|---|---|
| 算法突破 | ReLU 激活函数解决梯度消失;残差连接使百层网络可训练 | AlexNet 2012、ResNet 2015 |
| 数据爆炸 | 互联网产生海量标注数据;深度学习数据越多性能越好 | ImageNet 120 万张图像 |
| 算力革命 | GPU 并行计算将训练时间从数周压缩至数小时 | NVIDIA GPU + CUDA |
2.2 机器学习三步骤框架
任何机器学习方法都可拆解为三个步骤,理解这一框架是后续所有训练技巧的基础:
- 步骤一——定义 Loss Function(损失函数):衡量模型输出与正确答案的差距,即”如何判断好坏”
- 步骤二——确定函数搜索空间(Model Architecture):选择网络结构,划定候选函数的范围,即”在哪里搜索”
- 步骤三——Optimization(优化):在搜索空间内找到使 Loss 最低的最优函数,即”如何高效搜索”
训练的最终目标是找到一个函数,它在训练集(Training Set)上 Loss 低,在验证集(Validation Set)上 Loss 同样低。前者称为 Optimization 问题,两者的差距称为 Generalization 问题。
2.3 两大核心目标
深度学习训练技巧按其解决的问题,分为两类:
| 目标 | 表现症状 | 含义 | 典型方法 |
|---|---|---|---|
| Optimization | 训练 Loss 降不下去 | 优化过程出问题 | Adam、Skip Connection、Batch Norm |
| Generalization | 训练 Loss 低,验证 Loss 高 | 过拟合(Overfitting) | Dropout、Data Augmentation、正则化 |
判断原则:先看训练 Loss。若训练 Loss 本身降不下去,是 Optimization 问题,此时加 Dropout 或数据增强无效;若训练 Loss 够低但验证 Loss 高,才是 Generalization 问题。
2.4 发展时间线
flowchart LR
subgraph G1990 ["1990s 奠基"]
A["LeNet 1998<br/>CNN 奠基"] --> B["反向传播<br/>普及"]
end
subgraph G2012 ["2012-2014 爆发"]
C["AlexNet 2012<br/>ImageNet 突破"] --> D["Dropout 2014"]
D --> E["Adam 2014"]
end
subgraph G2015 ["2015-2017 深化"]
F["ResNet 2015<br/>Skip Connection"] --> G["BN 2015"]
G --> H["AdamW 2017"]
end
subgraph G2018 ["2018-2022 预训练"]
I["BERT/GPT 2018<br/>预训练范式"] --> J["Transformer<br/>主导"]
J --> R["RoPE 2021<br/>旋转位置编码"]
R --> K["LoRA 2021<br/>参数高效微调"]
end
subgraph G2022 ["2022 至今 大模型"]
L["Chinchilla<br/>2022 Scaling Laws"] --> M["ChatGPT 2022<br/>RLHF 对齐"]
M --> N["Flash Attn 2/3<br/>2023-2024"]
end
B --> C
E --> F
H --> I
K --> L
2.5 主要缩写
- ANN: Artificial Neural Network(人工神经网络)
- MLP: Multi-Layer Perceptron(多层感知机)
- CNN: Convolutional Neural Network(卷积神经网络)
- RNN: Recurrent Neural Network(循环神经网络)
- LSTM: Long Short-Term Memory(长短期记忆网络)
- SGD: Stochastic Gradient Descent(随机梯度下降)
- BN: Batch Normalization(批归一化)
- LN: Layer Normalization(层归一化)
- LR: Learning Rate(学习率)
- PEFT: Parameter-Efficient Fine-Tuning(参数高效微调)
- SFT: Supervised Fine-Tuning(监督微调)
- RLHF: Reinforcement Learning from Human Feedback(人类反馈强化学习)
3. 神经网络基础
3.1 多层感知机
多层感知机(Multi-Layer Perceptron,MLP) 是最基础的神经网络形式,由输入层、若干隐藏层(Hidden Layer)和输出层构成,每层均为全连接(Fully Connected):
\[h^{(l)} = f\left(W^{(l)} h^{(l-1)} + b^{(l)}\right)\]全连接意味着第 $l$ 层的每个神经元与第 $l-1$ 层所有神经元相连,参数量为两层神经元数之积。当输入维度极大时(如 1000×1000 的彩色图像展开后有 300 万维),全连接的参数量将超过数十亿,不仅难以训练,还极易过拟合。CNN 等专用架构正是为了解决这一问题而提出的。
3.2 激活函数
激活函数为神经网络引入非线性,使其能够拟合复杂函数。若没有非线性激活,多层网络与单层线性模型等价。
| 激活函数 | 公式 | 输出范围 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|---|---|
| Sigmoid | $\frac{1}{1+e^{-x}}$ | (0, 1) | 输出可解释为概率 | 梯度消失;非零中心 | 二分类输出层 |
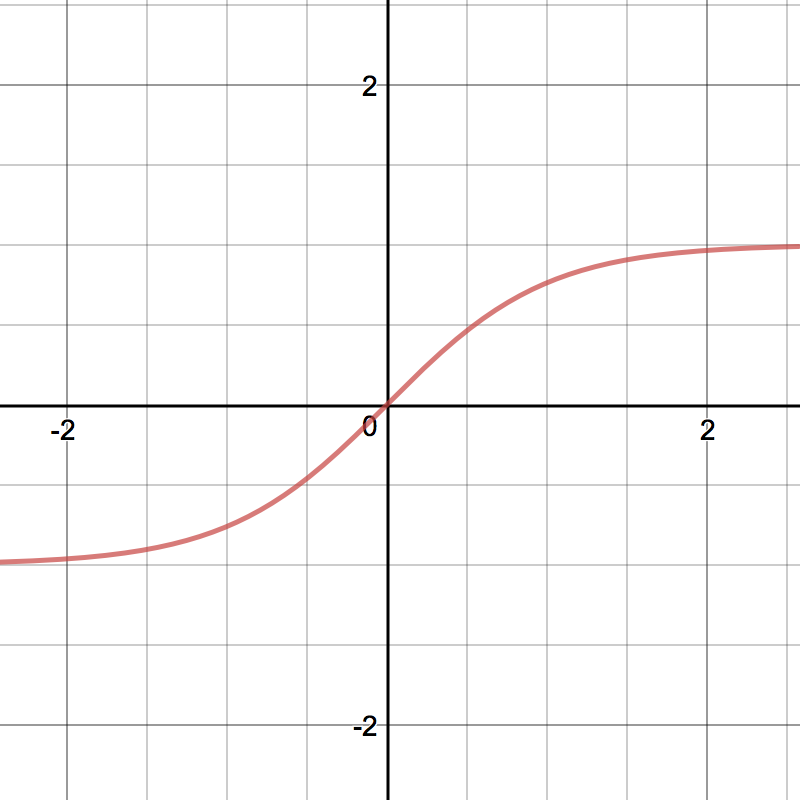
| Tanh | $\tanh(x)$ | (-1, 1) | 零中心输出 | 梯度消失仍存在 | RNN 隐藏层(较早期) |
| ReLU | $\max(0, x)$ | [0, ∞) | 计算简单;有效缓解梯度消失 | Dead Neuron 问题 | CNN/MLP 隐藏层(当前最常用) |
| Leaky ReLU | $\max(0.01x, x)$ | (-∞, ∞) | 解决 Dead Neuron | 斜率需调参 | ReLU 的改进替代 |
| GELU | $x \cdot \Phi(x)$ | (-∞, ∞) | 光滑;性能优 | 计算稍复杂 | Transformer(BERT、GPT)标配 |
| SiLU/Swish | $x \cdot \sigma(x)$ | (-∞, ∞) | 自门控;效果与 GELU 类似 | — | LLaMA、Qwen 等大语言模型 |
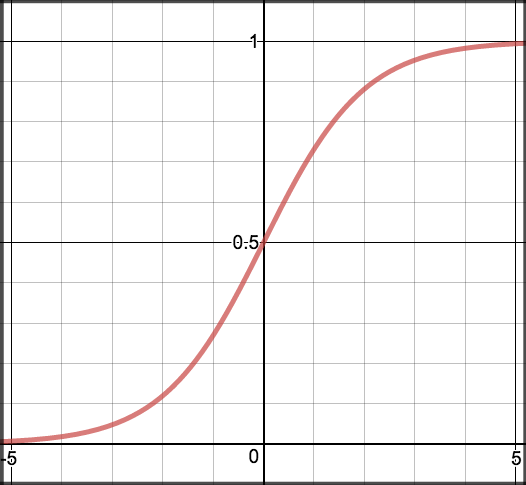
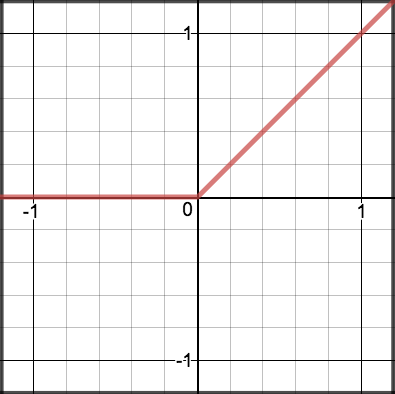
ReLU(Rectified Linear Unit) 的成功在于:正值区梯度恒为 1,有效缓解了深层网络的梯度消失问题,使几十甚至上百层的网络可以稳定训练。
3.3 反向传播算法
反向传播(Backpropagation) 是训练神经网络的核心算法,基于链式法则将 Loss 对每个参数的梯度从输出层逐层传递回输入层:
\[\frac{\partial \mathcal{L}}{\partial W^{(l)}} = \frac{\partial \mathcal{L}}{\partial h^{(l)}} \cdot \frac{\partial h^{(l)}}{\partial W^{(l)}}\]flowchart LR
Loss["Loss<br/>计算损失"] -->|"∂L/∂ŷ"| OutLayer["输出层<br/>计算梯度"]
OutLayer -->|"∂L/∂h²"| H2["隐藏层 2<br/>计算梯度"]
H2 -->|"∂L/∂h¹"| H1["隐藏层 1<br/>计算梯度"]
H1 -->|"∂L/∂W¹"| Update["参数更新<br/>梯度下降"]
style Loss fill:#ff9999
style Update fill:#99ff99
计算图(Computation Graph)自动记录前向计算路径,反向传播时沿路径反向传递梯度。PyTorch 的 autograd 机制即基于此原理,使用者只需定义前向计算,框架自动完成梯度计算。
一个最小反向传播数值例子
考虑最简单的单隐层网络:$y = w_2 \cdot \sigma(w_1 \cdot x)$,损失 $\mathcal{L} = \frac{1}{2}(y - t)^2$。设 $x=1, w_1=0.5, w_2=0.8, t=0.5$,激活 $\sigma$ 取 Sigmoid。
前向:
\[z_1 = w_1 x = 0.5, \quad a_1 = \sigma(0.5) \approx 0.622, \quad y = w_2 a_1 \approx 0.498, \quad \mathcal{L} \approx 2\times 10^{-6}\]反向(链式法则逐步回溯):
\[\frac{\partial \mathcal{L}}{\partial y} = y - t \approx -0.002\] \[\frac{\partial \mathcal{L}}{\partial w_2} = \frac{\partial \mathcal{L}}{\partial y} \cdot a_1 \approx -0.00124\] \[\frac{\partial \mathcal{L}}{\partial a_1} = \frac{\partial \mathcal{L}}{\partial y} \cdot w_2 \approx -0.0016\] \[\frac{\partial \mathcal{L}}{\partial z_1} = \frac{\partial \mathcal{L}}{\partial a_1} \cdot a_1(1-a_1) \approx -0.000376\] \[\frac{\partial \mathcal{L}}{\partial w_1} = \frac{\partial \mathcal{L}}{\partial z_1} \cdot x \approx -0.000376\]观察:靠近输出的梯度 $\partial \mathcal{L}/\partial w_2 \approx 10^{-3}$,靠近输入的梯度 $\partial \mathcal{L}/\partial w_1 \approx 10^{-4}$——即使只有 2 层,梯度已衰减 $\sim 3$ 倍。深层网络中每多一层就多一次 $\sigma’(\cdot) \leq 0.25$ 的乘法,这就是梯度消失的根源。
梯度下降的三种变体
根据每次更新使用的样本数,梯度下降有三种形式:
| 变体 | 每次更新使用样本数 | 优点 | 缺点 |
|---|---|---|---|
| Batch GD(全批量) | 整个训练集 | 梯度准确,收敛轨迹稳定 | 一次迭代成本巨大,无法利用大数据 |
| SGD(随机) | 1 | 内存占用最小,梯度噪声可逃出 saddle point | 收敛震荡严重,硬件利用率低 |
| Mini-batch SGD | $B$(通常 32–4096) | 兼顾效率与稳定;契合 GPU 并行 | 需调 batch size 超参 |
现代深度学习几乎全用 Mini-batch SGD。业界口头说的”SGD”通常指 mini-batch 版本。Batch size 的选择直接影响训练稳定性、硬件利用率和最终泛化性——大 batch 收敛快但泛化略差(Keskar et al., 2017 “On Large-Batch Training”),是重要的调参维度。
4. 经典网络架构
4.1 卷积神经网络
卷积神经网络(Convolutional Neural Network,CNN) 是处理网格状数据(图像、时序信号)的标准架构。CNN 对 MLP 做了两项关键约束:
Receptive Field(感受野):每个神经元只观察输入的局部区域(如 3×3 的 kernel),而非整张图像。图像中的局部模式(边缘、纹理)只需局部感知即可检测,无需全局视野。
Parameter Sharing(参数共享):不同位置的同类神经元共享同一组参数(filter/卷积核)。同一模式(如水平边缘)出现在图像任何位置,应由相同的检测器处理——这一约束引入了平移不变性(Translation Invariance)。
卷积层的核心超参数
| 超参数 | 含义 | 典型取值 | 影响 |
|---|---|---|---|
| Kernel Size $k$ | 卷积核空间尺寸 | 3×3(主流)、5×5、7×7 | 感受野大小;3×3 是 VGG 以来的标配 |
| Stride $s$ | 卷积滑动步长 | 1(常规)、2(下采样) | 步长大于 1 时空间尺寸缩小,替代池化 |
| Padding $p$ | 边缘填充像素 | “same” / “valid” | “same” 保持输出尺寸,”valid” 不填充 |
| Dilation $d$ | 空洞率 | 1(常规)、2、4 | 扩大感受野而不增加参数(DeepLab 语义分割) |
| Channels $C$ | 输出特征图数量 | 64/128/256/512 | 同层通道数决定特征多样性 |
输出空间尺寸公式:
\[\text{out} = \left\lfloor \frac{\text{in} + 2p - d(k-1) - 1}{s} \right\rfloor + 1\]常规卷积($d=1$)简化为 $\text{out} = \lfloor (\text{in} + 2p - k)/s \rfloor + 1$。
特殊卷积
| 类型 | 核心思想 | 代表模型 | 作用 |
|---|---|---|---|
| 1×1 卷积 | 逐点线性组合通道 | NiN、ResNet bottleneck | 改变通道数、降维升维、增加非线性 |
| Depthwise Separable | 深度卷积(逐通道)+ 1×1 逐点卷积 | MobileNet、EfficientNet | 参数量与计算量降至 $\sim 1/k^2$ |
| Dilated / Atrous | 卷积核带”空洞” | DeepLab | 不增参扩大感受野,适合稠密预测 |
| Transposed Conv | 反向卷积实现上采样 | FCN、GAN Generator | 用于分割、生成任务的上采样 |
| Grouped Conv | 通道分组独立卷积 | AlexNet、ResNeXt | 降低计算量,增强特征多样性 |
池化层(Pooling)
池化对特征图做下采样,降低空间尺寸、扩大感受野、提供一定平移不变性。池化层无可学习参数。
| 方法 | 操作 | 场景 |
|---|---|---|
| Max Pooling | 取窗口内最大值 | 提取最显著特征,CNN 中层最常用 |
| Average Pooling | 取窗口内均值 | 平滑特征,早期网络常用 |
| Global Average Pooling (GAP) | 对整个 feature map 取均值 | 替代全连接层,大幅减参(GoogLeNet、ResNet 末尾) |
| Adaptive Pooling | 指定输出尺寸自动计算 kernel | 适配不同输入分辨率 |
GAP 的意义:VGG-16 的全连接层占掉 123M 参数(占总参数 89%);改用 GAP 后可直接省掉这部分,这是 ResNet、EfficientNet 参数量远小于 VGG 的关键原因之一。
典型 CNN 由交替的卷积层(提取特征)和池化层(下采样)构成,最终接全连接层或 GAP 输出预测。以下是 CNN 奠基之作 LeNet-5(LeCun,1998)的结构:

CNN 架构演进对比
| 模型 | 年份 | 参数量 | ImageNet Top-1 | 关键创新 |
|---|---|---|---|---|
| LeNet-5 | 1998 | ~60K | — (MNIST) | CNN 奠基,卷积+池化结构 |
| AlexNet | 2012 | 60M | ~56.5% | GPU 训练、ReLU、Dropout |
| VGG-16 | 2014 | 138M | ~71.5% | 统一 3×3 卷积,网络更深 |
| GoogLeNet | 2014 | 6.8M | ~69.8% | Inception 模块,大幅减少参数 |
| ResNet-50 | 2015 | 25M | ~76.0% | 残差连接,使极深网络可训练 |
| ResNet-152 | 2015 | 60M | ~77.8% | 超越人类水平(Top-5 3.57%) |
| SENet-154 | 2017 | ~115M | ~82.7% | 通道注意力(Squeeze-Excitation) |
| EfficientNet-B0 | 2019 | 5.3M | 77.1% | 复合缩放(NAS 搜索最优比例) |
| EfficientNet-B7 | 2019 | 66M | 84.4% | 参数效率最佳 |
| ViT-B/16 | 2020 | 86M | ~81.8% | 纯 Transformer 用于图像 |
| ConvNeXt-XL | 2022 | 350M | ~87.8% | CNN 吸收 Transformer 设计理念 |
关键洞察:ResNet-50(25M 参数)性能超过 VGG-16(138M 参数),参数量仅 18%;EfficientNet-B0(5.3M)达到 VGG 同等精度,参数量仅 4%。更多参数 ≠ 更高性能,架构设计至关重要。
ResNet 残差块结构

4.2 循环神经网络与 LSTM
循环神经网络(Recurrent Neural Network,RNN) 专为处理序列数据设计,通过隐藏状态 $h_t$ 在时间步间传递信息:
\[h_t = f(W_h h_{t-1} + W_x x_t + b)\]RNN 在每个时间步使用同一组参数 $W_h, W_x$,使其天然适配变长序列。下图展示了 RNN 在时间维度上的”展开”:
flowchart LR
x0["x₀"] --> h0["h₀"]
x1["x₁"] --> h1["h₁"]
x2["x₂"] --> h2["h₂"]
x3["x₃"] --> h3["h₃"]
h0 -->|"Wₕ"| h1
h1 -->|"Wₕ"| h2
h2 -->|"Wₕ"| h3
h0 --> y0["y₀"]
h1 --> y1["y₁"]
h2 --> y2["y₂"]
h3 --> y3["y₃"]
style h0 fill:#e1f5ff
style h1 fill:#e1f5ff
style h2 fill:#e1f5ff
style h3 fill:#e1f5ff
然而,标准 RNN 面临严重的长程依赖(Long-range Dependency) 问题:梯度在时间维度上反向传播时需对矩阵 $W_h$ 连乘 $T$ 次,当 $W_h$ 的最大奇异值 $< 1$ 时梯度随序列长度指数衰减(梯度消失),$> 1$ 时指数爆炸(梯度爆炸),导致模型难以记忆距离较远的上下文。
LSTM(Long Short-Term Memory,Hochreiter & Schmidhuber,1997) 通过引入门控机制(Gating Mechanism) 解决这一问题:

LSTM 维护两个状态:隐藏状态 $h_t$(短期记忆)和细胞状态 $c_t$(长期记忆)。
单个 LSTM cell 的内部数据流:
flowchart LR
subgraph INPUT ["输入"]
XT["xₜ"]
HT1["hₜ₋₁"]
CT1["cₜ₋₁"]
end
CONCAT["拼接 [hₜ₋₁, xₜ]"]
XT --> CONCAT
HT1 --> CONCAT
CONCAT --> FGATE["遗忘门 fₜ<br/>σ(W·)"]
CONCAT --> IGATE["输入门 iₜ<br/>σ(W·)"]
CONCAT --> CAND["候选 c̃ₜ<br/>tanh(W·)"]
CONCAT --> OGATE["输出门 oₜ<br/>σ(W·)"]
CT1 --> MUL1["× fₜ<br/>遗忘旧记忆"]
FGATE --> MUL1
IGATE --> MUL2["× c̃ₜ<br/>写入新记忆"]
CAND --> MUL2
MUL1 --> ADD["+"]
MUL2 --> ADD
ADD --> CT["cₜ<br/>新细胞状态"]
CT --> TANH["tanh"]
TANH --> MUL3["× oₜ"]
OGATE --> MUL3
MUL3 --> HT["hₜ<br/>新隐藏状态"]
style CT fill:#ffe1c4
style HT fill:#c4e1ff
style CT1 fill:#ffe1c4
style HT1 fill:#c4e1ff
细胞状态更新公式:
\[c_t = f_t \odot c_{t-1} + i_t \odot \tilde{c}_t\]| 组件 | 公式 | 作用 |
|---|---|---|
| 遗忘门 $f_t$ | $\sigma(W_f [h_{t-1}, x_t] + b_f)$ | 决定遗忘多少历史细胞状态 |
| 输入门 $i_t$ | $\sigma(W_i [h_{t-1}, x_t] + b_i)$ | 决定写入多少新信息 |
| 候选值 \(\tilde{c}_t\) | $\tanh(W_c [h_{t-1}, x_t] + b_c)$ | 计算待写入的新信息 |
| 输出门 $o_t$ | $\sigma(W_o [h_{t-1}, x_t] + b_o)$ | 决定以多少细胞状态作为输出 |
为什么门控能缓解梯度消失? 细胞状态更新 $c_t = f_t \odot c_{t-1} + \ldots$ 是一条加性路径(对比 RNN 的乘性递推 $h_t = f(Wh_{t-1} + \ldots)$)。当遗忘门 $f_t \approx 1$ 时,$c_{t-1}$ 几乎无衰减地传递到 $c_t$,梯度沿细胞状态反向传播时也能保持稳定——类似 ResNet 的 skip connection,只是发生在时间维度而非深度维度。
GRU:LSTM 的简化版
Gated Recurrent Unit(GRU,Cho et al., 2014) 将 LSTM 的 3 个门精简为 2 个门,并合并细胞状态与隐藏状态:
\[r_t = \sigma(W_r [h_{t-1}, x_t]) \quad \text{(重置门)}\] \[z_t = \sigma(W_z [h_{t-1}, x_t]) \quad \text{(更新门)}\] \[\tilde{h}_t = \tanh(W_h [r_t \odot h_{t-1}, x_t])\] \[h_t = (1-z_t) \odot h_{t-1} + z_t \odot \tilde{h}_t\]| 维度 | LSTM | GRU |
|---|---|---|
| 门控数量 | 3(f, i, o) | 2(r, z) |
| 状态数量 | 2(h, c) | 1(h) |
| 参数量(相同隐层维度) | 4 套权重 | 3 套权重 |
| 收敛速度 | 较慢 | 较快 |
| 长程依赖建模 | 更强(细胞状态保护) | 略弱但足够 |
| 工程场景 | 长序列、复杂任务 | 短序列、资源受限 |
经验结论:Chung et al., 2014 系统实验显示 GRU 与 LSTM 在多数任务上性能相当,GRU 因参数更少、训练更快,在中短序列任务(对话、情感分类)中更常用;LSTM 在需要严格长期记忆的任务(机器翻译长句、语音识别)中仍有优势。
双向 RNN(Bidirectional RNN)
标准 RNN 只能利用过去的信息(从左到右)。但对许多任务(命名实体识别、情感分析、阅读理解),未来的上下文同样关键——例如判断 “bank” 是”银行”还是”河岸”,需要看后面的词。
Bidirectional RNN(Schuster & Paliwal, 1997) 同时跑两个方向的 RNN,输出拼接:
\[\overrightarrow{h}_t = \text{RNN}_\text{fwd}(x_t, \overrightarrow{h}_{t-1}), \quad \overleftarrow{h}_t = \text{RNN}_\text{bwd}(x_t, \overleftarrow{h}_{t+1})\] \[h_t = [\overrightarrow{h}_t; \overleftarrow{h}_t]\]flowchart LR
x1["x₁"] --> fh1["→h₁"]
x2["x₂"] --> fh2["→h₂"]
x3["x₃"] --> fh3["→h₃"]
fh1 --> fh2 --> fh3
x1 --> bh1["←h₁"]
x2 --> bh2["←h₂"]
x3 --> bh3["←h₃"]
bh3 --> bh2 --> bh1
fh1 --> c1["[→;←] h₁"]
bh1 --> c1
fh2 --> c2["[→;←] h₂"]
bh2 --> c2
fh3 --> c3["[→;←] h₃"]
bh3 --> c3
style c1 fill:#c4e1ff
style c2 fill:#c4e1ff
style c3 fill:#c4e1ff
限制:双向 RNN 必须看到整个序列才能计算,不能用于自回归生成任务(生成下一个词时没有未来信息)。因此:
- 适合:序列标注、分类、NER、阅读理解(BiLSTM-CRF 在 2016–2018 年是 NER 主流方案)
- 不适合:语言模型、机器翻译的 Decoder 端
BERT 的 MLM(Masked Language Model)可以看作 Transformer 对”双向建模”的一般化——通过 mask 保证双向注意力不会泄露目标。
Teacher Forcing:训练序列生成模型的关键技巧
训练 Seq2Seq / RNN Decoder 时有一个微妙的选择——解码第 $t$ 步时,输入是什么?
| 策略 | 第 $t$ 步输入 | 优点 | 缺点 |
|---|---|---|---|
| Teacher Forcing | 真实标签 $y_{t-1}$ | 训练稳定、收敛快 | 训练-推理分布不一致(推理用自己的预测) |
| Free Running | 模型预测 $\hat{y}_{t-1}$ | 与推理完全一致 | 训练初期模型预测很差,错误级联,难以收敛 |
| Scheduled Sampling | 按概率 $p$ 采样真实或预测(Bengio et al., 2015) | 折中方案,逐步切换 | 需调 schedule 超参 |
Teacher Forcing 的问题——Exposure Bias:训练时模型从未”见过”自己的错误预测,推理时一旦某步预测偏了就会越错越远(错误累积 / hallucination 的雏形)。
现代解决方案:
- Scheduled Sampling:训练后期逐渐混入模型预测
- Minimum Risk Training / REINFORCE:直接用生成序列的整体质量作为训练信号
- Transformer + Causal Masking:一次性并行计算所有位置(见 §4.3),本质上仍是 Teacher Forcing,但效率远高于 RNN 逐步递推
代表性工作:GRU(2014,LSTM 的简化版)、Seq2Seq(2014)、Attention + LSTM(2015)、Bidirectional LSTM(2005 提出、BiLSTM-CRF 2016 广泛应用)
4.3 Transformer
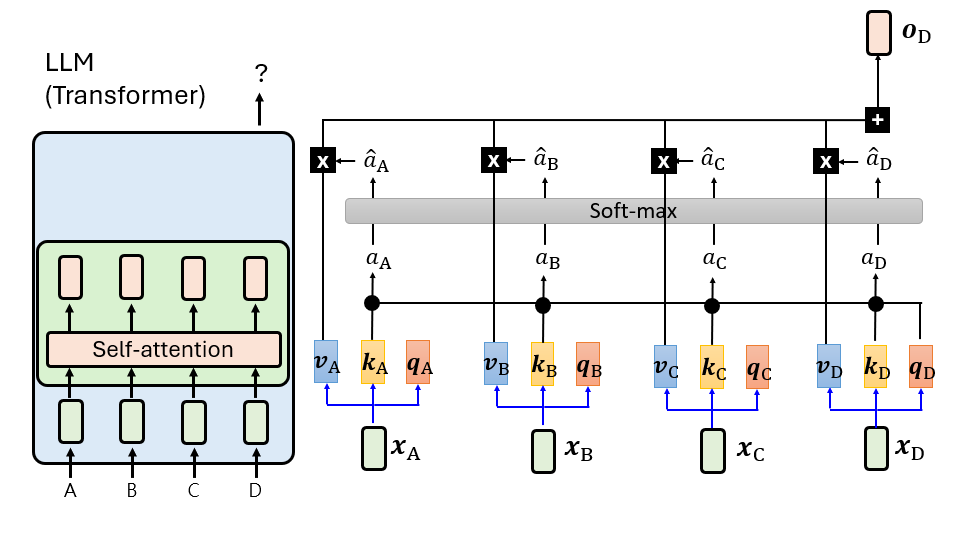
Transformer(Vaswani et al.,2017)彻底改变了 NLP 乃至整个深度学习格局。它完全放弃了循环和卷积,仅通过自注意力机制(Self-Attention)直接建模序列中任意两个位置之间的全局依赖关系。
核心机制:缩放点积注意力
\[\text{Attention}(Q, K, V) = \text{softmax}\left(\frac{QK^T}{\sqrt{d_k}}\right)V\]- Query (Q):代表”我要找什么”(如当前词)。
- Key (K):代表”我有什么特征”(用于与 Q 匹配)。
- Value (V):代表”我要传递的信息”(匹配成功后的内容)。
- $\sqrt{d_k}$ 缩放:当维度很大时,点积结果可能极大,导致 softmax 进入梯度极小的区域。缩放可保持梯度稳定。
一个具体例子:句子 “The cat sat on the mat”
假设模型正在处理动词 “sat”,它需要找到”谁坐下”(主语):
| Token | Q(在找什么?) | K(我是什么?) | V(我能提供什么?) |
|---|---|---|---|
| The | 限定词上下文 | 限定词 | 无实质信息 |
| cat | — | 名词、单数、生物 | “cat” 语义向量 |
| sat | 找一个能做动作的单数名词主语 | 过去式动词 | “sit” 动作语义 |
| on | 位置介词补语 | 介词 | 位置关系 |
| the | 限定词上下文 | 限定词 | 无实质信息 |
| mat | 名词、单数、物体 | 名词、单数、物体 | “mat” 语义向量 |
- sat 的 Q 与 cat 的 K 点积最大(匹配”单数名词主语”),softmax 后 attention 权重 $\approx 0.7$
- sat 的 Q 与 mat 的 K 也有一定匹配(名词),但语义角色不对,权重 $\approx 0.15$
- 最终 sat 的输出 $\approx 0.7 \cdot V_\text{cat} + 0.15 \cdot V_\text{mat} + \ldots$ — 主要吸收了 cat 的语义
这就是 Attention 的工作方式:每个 token 广播一个”查询”,所有 token 回应”我匹配多少”,最后按匹配程度加权聚合信息。Q/K/V 由三个不同的线性投影 $W_Q, W_K, W_V$ 从同一个输入生成,这种灵活性让模型可以学习各种复杂的信息路由模式。
多头注意力(Multi-Head Attention)
将输入映射到 $h$ 个不同的子空间分别计算注意力,再将结果拼接: \(\text{MultiHead}(Q,K,V) = \text{Concat}(head_1, \ldots, head_h) W^O\) 直觉理解:不同的”头”可以同时关注不同的信息(如一个头关注语法关系,另一个头关注语义关联)。

Attention 变体:MHA → MQA → GQA → MLA
随着大模型上下文变长,KV Cache(推理时缓存所有历史 token 的 K、V)的显存占用成为瓶颈。为此,Attention 的多头结构演进出多个变体,核心都是减少 K/V 头数以压缩 KV Cache:
| 变体 | 年份 | K/V 头数 | KV Cache 相对 MHA | 代表模型 |
|---|---|---|---|---|
| MHA(Multi-Head Attention) | 2017 | 每个 Q 头独立 K/V(共 $h$ 组) | 100% | 原始 Transformer、GPT-2 |
| MQA(Multi-Query Attention) | 2019 | 所有 Q 头共享 1 组 K/V | $1/h$ | PaLM、Falcon |
| GQA(Grouped-Query Attention) | 2023 | Q 头分组,组内共享 K/V(共 $g$ 组,$1 < g < h$) | $g/h$ | LLaMA-2/3、Mixtral、Qwen |
| MLA(Multi-head Latent Attention) | 2024 | K/V 低秩压缩到潜空间 | $\sim 5-13\%$ | DeepSeek-V2/V3 |
flowchart LR
subgraph MHA ["MHA:每 Q 头独立 KV"]
Q1["Q₁"] --> KV1["K₁,V₁"]
Q2["Q₂"] --> KV2["K₂,V₂"]
Q3["Q₃"] --> KV3["K₃,V₃"]
Q4["Q₄"] --> KV4["K₄,V₄"]
end
subgraph GQA ["GQA:分组共享 KV(g=2)"]
Q1G["Q₁"] --> KVA["K,V 组 A"]
Q2G["Q₂"] --> KVA
Q3G["Q₃"] --> KVB["K,V 组 B"]
Q4G["Q₄"] --> KVB
end
subgraph MQA ["MQA:所有 Q 共享 1 组 KV"]
Q1M["Q₁"] --> KVS["K,V 共享"]
Q2M["Q₂"] --> KVS
Q3M["Q₃"] --> KVS
Q4M["Q₄"] --> KVS
end
为什么 GQA 成为主流:MQA 过于激进(压到 1 组),质量损失明显;MHA 显存太重。GQA 在质量与显存间取得平衡——LLaMA-2 70B 用 8 组、64 Q 头,KV Cache 仅为 MHA 的 1/8,而性能几乎无损,是当前开源大模型的事实标准。
MLA 的创新:DeepSeek 将 K/V 用低秩矩阵压缩至 $\sim$128 维的 latent space,推理时只缓存 latent 向量,需要时再恢复完整 K/V。在极长上下文下显存优势显著。
关键组件
1. 位置编码(Positional Encoding)
为什么需要位置编码? Transformer 的核心——自注意力机制是置换不变的(Permutation Invariant)。在计算 $O = \sum \alpha_i V_i$ 时,由于加法满足交换律,模型无法分辨输入顺序。如果没有位置信息,句子”你打我”和”我打你”在模型看来是完全一样的。因此,必须将位置信息注入 Input Embedding 中。
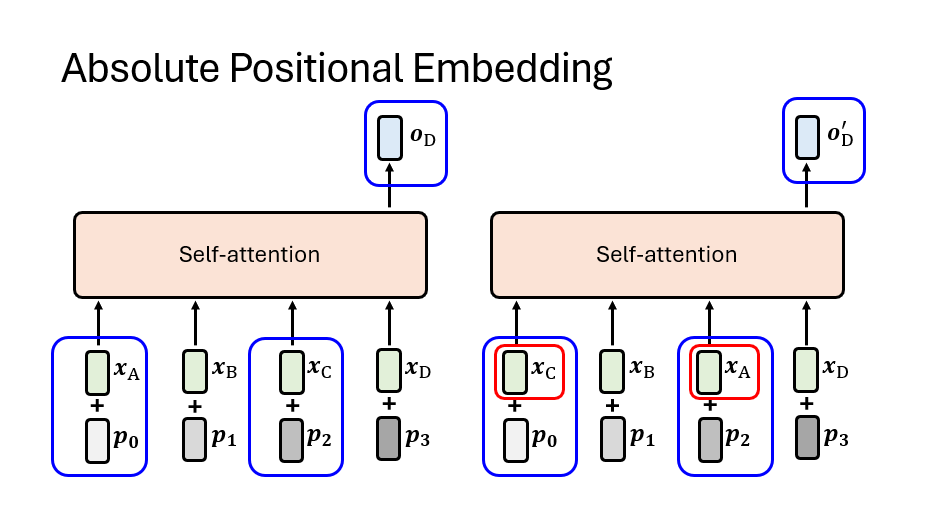
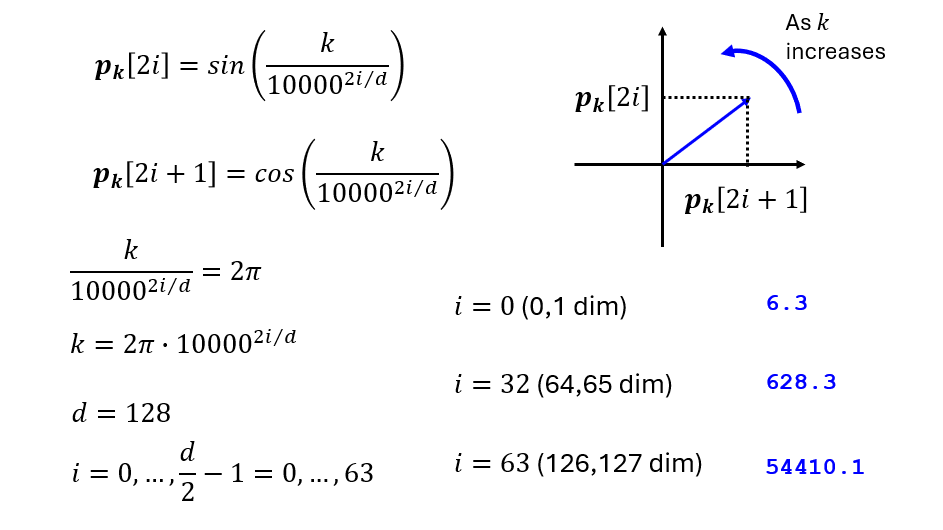
绝对位置编码:Sinusoidal 设计 原始 Transformer 采用预定义的正余弦函数构造位置向量: \(PE_{(pos, 2i)} = \sin\left(\frac{pos}{10000^{2i/d_{model}}}\right)\) \(PE_{(pos, 2i+1)} = \cos\left(\frac{pos}{10000^{2i/d_{model}}}\right)\)
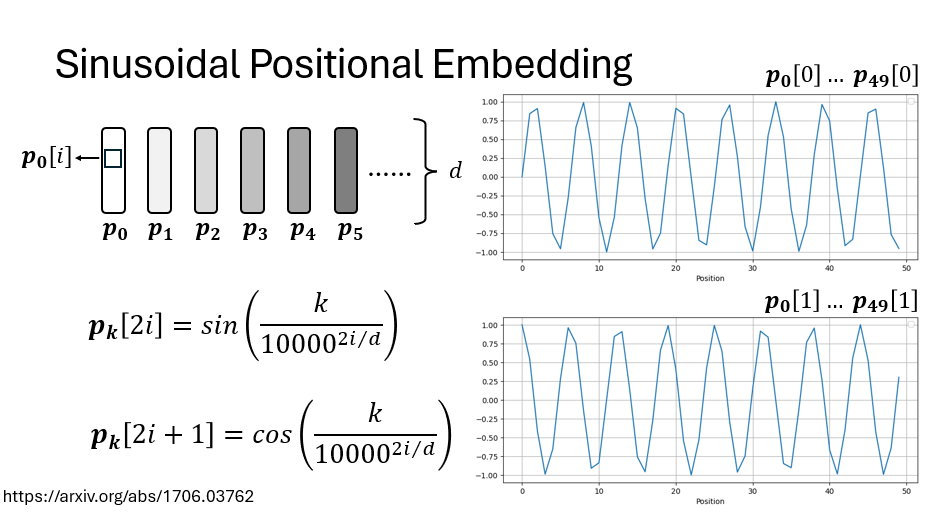
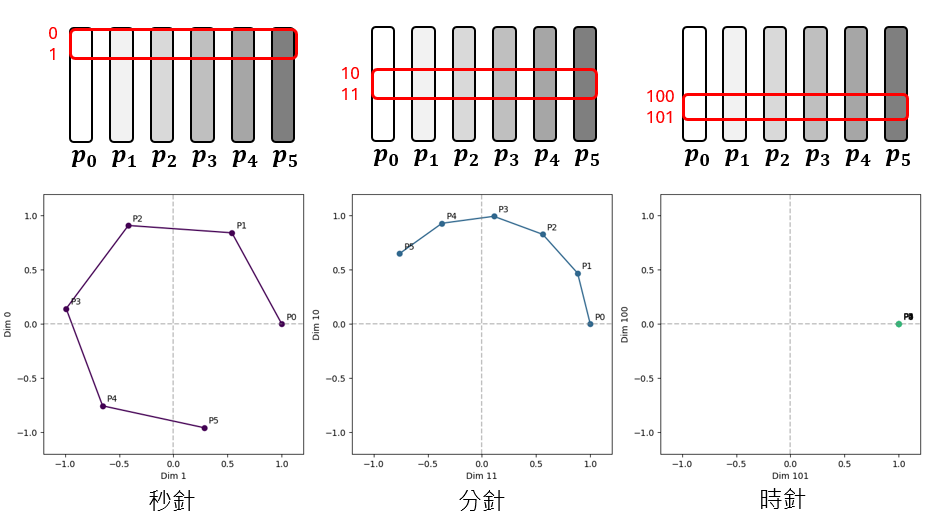
直观理解:多频指针(Clock Hands) 我们可以将每一对 $(\sin, \cos)$ 看作二维平面上的一个”指针”。
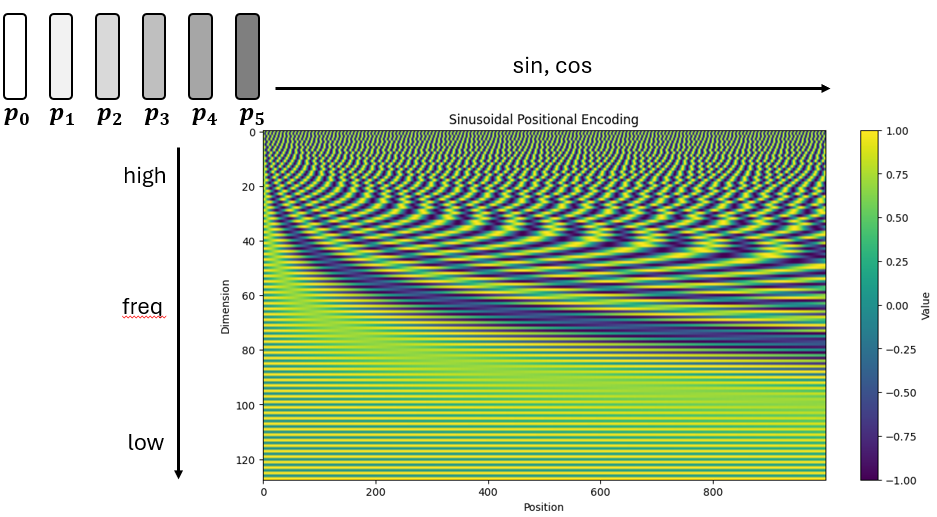
- 低维($i$ 小):频率高,指针旋转极快。类似时钟的”秒针”,几个 Token 就会转完一圈。
- 高维($i$ 大):频率低,指针旋转极慢。类似”时针”,可能需要上万个 Token 才转一圈。 Transformer 就像是在观察由几十个不同转速的指针构成的仪表盘,从而精确锁定当前 Token 在序列中的绝对位置。
数学特性:建模相对位置 作者选择正余弦函数的精妙之处在于,它允许模型通过线性变换表达相对位置。根据三角函数合角公式,存在一个仅与相对距离 $r$ 有关的变换矩阵 $M_r$,使得: \(PE_{pos+r} = M_r \cdot PE_{pos}\) 这意味着模型在计算 Attention 时,可以更容易地捕捉到两个词之间的距离信息,而不仅仅是绝对坐标。
RoPE位置编码:Rotary Position Embedding 设计
绝对位置编码把位置信息加在 Input Embedding 上,间接影响 Attention;ALiBi 则在 Attention Score 上强行减去距离偏差。RoPE 选择了另一条路:在 Q 与 K 做内积之前,直接把位置信息以旋转的方式编码进向量本身。
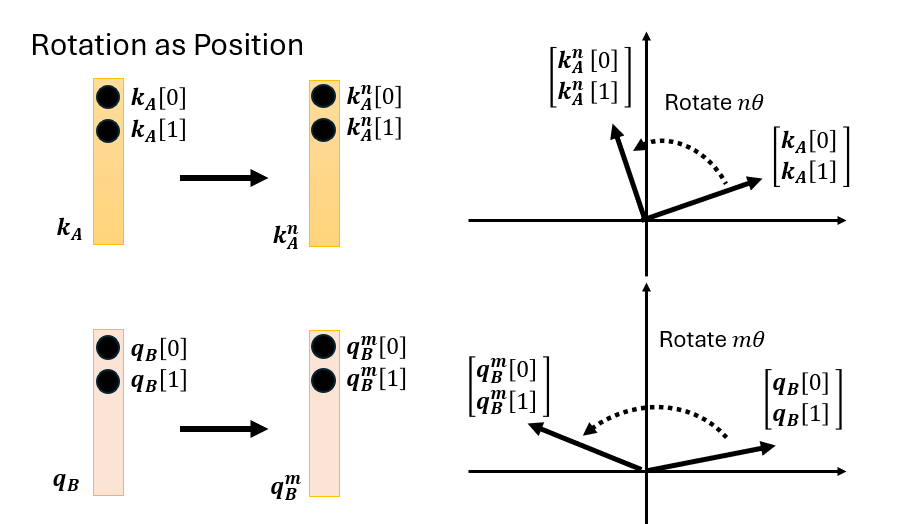
核心思想:用旋转代替加法
对向量的每两个维度($d_0, d_1$),RoPE 将其视为二维平面上的一个向量,然后根据 token 所在位置 $m$ 旋转对应角度:
\[\text{K}^{(m)} = R(m\theta) \cdot \text{K}, \quad \text{Q}^{(m)} = R(m\theta) \cdot \text{Q}\]其中旋转矩阵为标准二维旋转矩阵:
\[R(\alpha) = \begin{pmatrix} \cos\alpha & -\sin\alpha \\ \sin\alpha & \cos\alpha \end{pmatrix}\]对于 $d$ 维向量,将所有维度两两分组,共 $d/2$ 组,每组使用不同的基础角度 $\theta_i$:
\[\theta_i = 10000^{-2i/d}, \quad i = 0, 1, \ldots, \frac{d}{2}-1\]这个设计与 Sinusoidal PE 一脉相承——不同维度对应不同频率,低维度旋转快、高维度旋转慢,共同构成唯一的位置指纹。
RoPE 如何天然编码相对位置?
当 Q 在位置 $m$、K 在位置 $n$ 时,两者做内积:
\[\langle \text{Q}^{(m)}, \text{K}^{(n)} \rangle = \text{Q}^T \cdot R((m-n)\theta) \cdot \text{K}\]内积结果只依赖相对距离 $m-n$,而非绝对坐标。这正是 RoPE 最精妙之处——无需像 Relative PE 那样显式建模相对距离,旋转的几何性质自动保证了这一点。
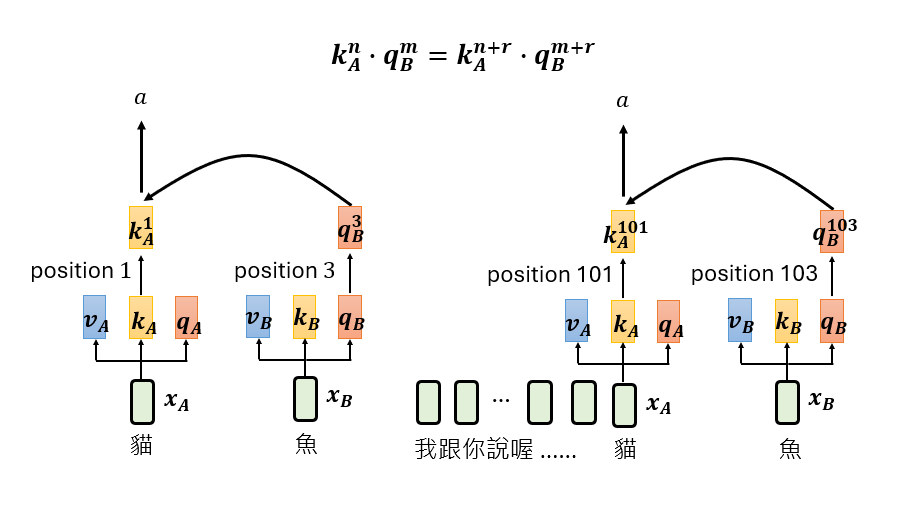
平移不变性的几何证明
假设”猫”在位置 1,”鱼”在位置 3,算出 Attention 值 $A$。现在在前面插入 100 个无关 token,”猫”变到位置 101,”鱼”变到位置 103。二者相对距离不变(仍是 2),内积中的旋转角度 $(m-n)\theta$ 保持不变,所以 Attention 值仍等于 $A$。
几何上更直观:Q 旋转 $N\theta$,K 旋转 $N\theta$,二者同步旋转,内积(夹角的余弦)不变。
与工程加速的兼容性
RoPE 只修改了 Q 和 K 本身,Attention 的计算流程与原版完全相同,因此天然兼容所有 Attention 加速技术:
- Flash Attention:直接可用,无需修改算子;
- KV Cache:直接缓存已旋转的 $\text{K}^{(m)}$,读出即用,无需再次注入位置。
这也是 RoPE 最终胜出的关键工程原因之一——它不仅效果好,而且和整个工程生态完美兼容。
常见误解澄清
很多人以为 RoPE 像 ALiBi 一样保证”Q 与 K 距离越远,Attention 越小”。实际上 RoPE 并不保证这一点——旋转会产生周期性的振荡模式,Attention 随距离呈锯齿状波动。
这反而是优势:RoPE 允许模型学习到”虽然距离远,但仍然高度相关”的 Attention 模式(例如长程依赖),而 ALiBi 则硬性压制了远距离的注意力。
位置编码的演进 | 方案 | 核心思想 | 特点 | 代表模型 | |:—|:—|:—|:—| | Absolute PE | 正余弦或可学习 Embedding | 简单,但外推性差(无法处理比训练更长的序列)| BERT、原始 Transformer | | Relative PE | 建模 $i$ 和 $j$ 的相对距离 | 关注距离而非绝对坐标 | T5 | | ALiBi | 在 Attention Score 上减去距离偏差 | 外推性极强,计算极其简单 | MPT、Bloom | | RoPE | 将 $Q, K$ 旋转特定角度(旋转位置嵌入)| 当前 SOTA,结合了绝对与相对的优点 | LLaMA、Qwen、Gemma |
2. 逐点前馈网络(Point-wise FFN) 在每个注意力层后,接一个全连接块(通常是 $d_{model} \to 4d_{model} \to d_{model}$),引入非线性变换: \(\text{FFN}(x) = \text{max}(0, xW_1 + b_1)W_2 + b_2\)
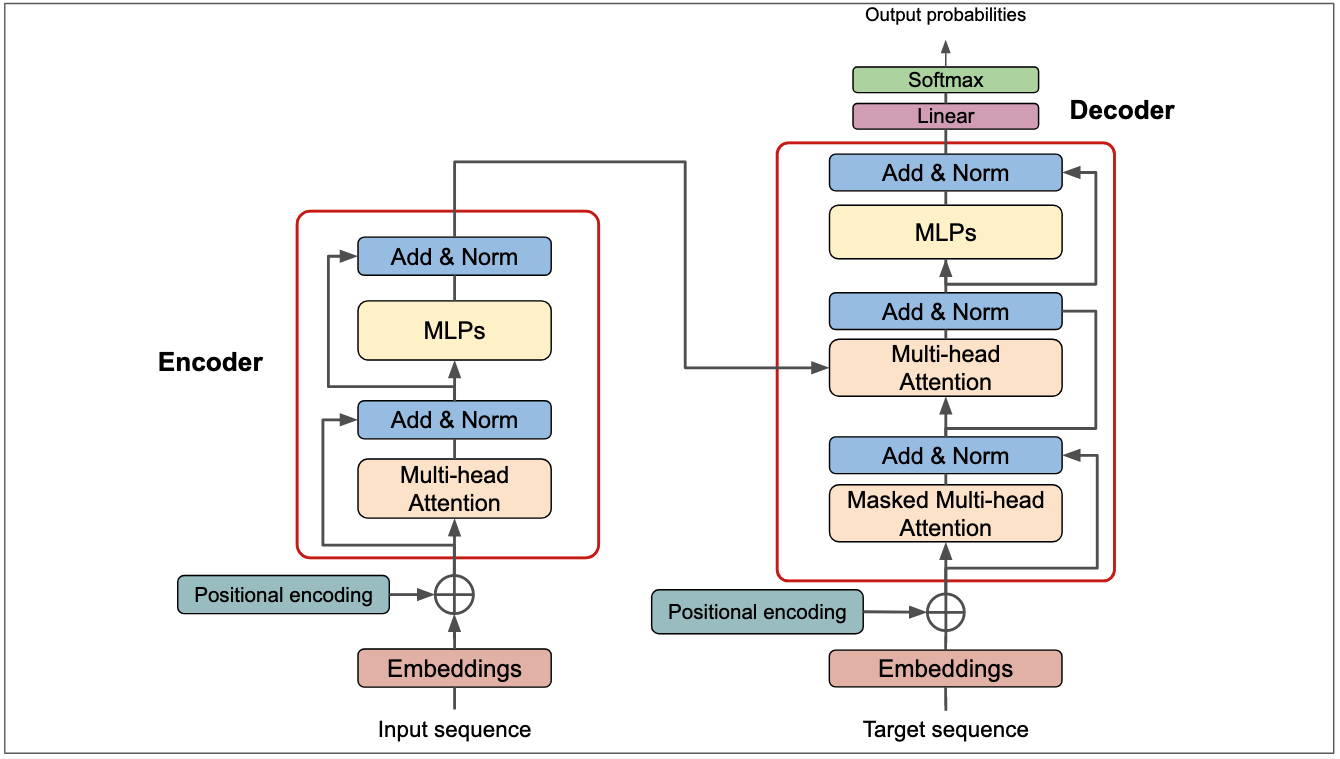
3. 残差连接与归一化(Add & Norm) 每个子层均采用残差连接,并配合层归一化(LayerNorm)。目前存在两种主流布局:
- Post-LN(原始版):先计算子层再加残差做 LN。性能好但深层难以训练。
- Pre-LN(现代大模型标配):先做 LN 再计算子层。训练更稳定,无需复杂的 Warmup 策略(如 GPT-2/3、LLaMA)。
Encoder 与 Decoder 的差异
Transformer 采用编码器-解码器架构,两者的核心区别在于掩码(Masking):
- Encoder:双向注意力,每个词都能看到序列中的所有词。
- Decoder:采用 Masked Self-Attention,确保生成第 $t$ 个词时只能看到前 $t-1$ 个词(防止信息泄露);同时包含 Cross-Attention,用于关注 Encoder 的输出。
因果掩码(Causal Mask)的具体形式——一个 $n \times n$ 的下三角矩阵(以序列长度 4 为例):
| $k_1$ | $k_2$ | $k_3$ | $k_4$ | |
|---|---|---|---|---|
| $q_1$ | ✓ | −∞ | −∞ | −∞ |
| $q_2$ | ✓ | ✓ | −∞ | −∞ |
| $q_3$ | ✓ | ✓ | ✓ | −∞ |
| $q_4$ | ✓ | ✓ | ✓ | ✓ |
实现:在 softmax 之前,将掩码位置的 attention score 置为 $-\infty$(实际用 -1e9 之类的大负数),softmax 后这些位置的权重变为 0。这保证了”第 $t$ 个 token 只能看到 $\leq t$ 的位置”的因果性,也就实现了训练时的并行化 Teacher Forcing——不再像 RNN 那样逐步递推,而是一次前向同时预测所有位置的下一个 token。
Attention 可视化:模型真的学到了什么?
Attention 的最大魅力之一是可解释性——每一层每一个头的 attention 权重可以直接可视化为热力图,揭示模型的”关注模式”。典型发现:
| 关注模式 | 示例 | 解释 |
|---|---|---|
| 指代消解头 | “The cat … it was hungry” 中 “it” 的 attention 指向 “cat” | 某些头专门处理代词指代 |
| 句法头 | 动词关注其主语、宾语;形容词关注修饰的名词 | 隐式学到了语法依存 |
| 位置头 | 每个 token 关注紧邻的前一个或后一个 | 捕捉局部 bigram 模式 |
| 分隔符头 | 所有 token 关注 [SEP] 或标点 | 相当于”全局信息池” |
| 冗余头 | 与其他头高度相似 | 为什么 Attention Head Pruning 有效的依据 |
BertViz(Vig, 2019)、attention-flow(Abnar & Zuidema, 2020)等工具能交互式展示这些模式。Clark et al., 2019 “What Does BERT Look At?” 系统分析了 BERT 的 144 个头,发现大量头捕获了清晰可解释的语法/语义功能——这是 Transformer 超越”黑盒”标签的重要证据。
RNN 与 Transformer 对比
| 维度 | RNN/LSTM | Transformer |
|---|---|---|
| 计算方式 | 顺序递推,无法并行 | 全并行计算,硬件利用率极高 |
| 长程依赖 | 随距离指数衰减,难以捕获超长文本 | 任意两位置距离恒为 1,无信息损耗 |
| 上下文范围 | 局部上下文 | 全局上下文 |
| 归纳偏置 | 强(时序关联) | 弱(全连接性质),需要更多数据训练 |
| 显存复杂度 | $O(n \cdot d^2)$ | $O(n^2 \cdot d)$,长序列下显存压力大 |
代表性工作:BERT(2018,纯 Encoder)、GPT 系列(2018-至今,纯 Decoder)、T5(2019,Encoder-Decoder)、ViT(2020,将图像分块视为序列)。
Vision Transformer(ViT):Transformer 进入视觉领域
ViT(Vision Transformer,Dosovitskiy et al., 2020) 首次证明纯 Transformer 在足够数据下可以直接击败 CNN 处理图像任务,终结了 CNN 在视觉领域近十年的统治。
核心设计:把图像当作”句子”处理
flowchart LR
IMG["原图<br/>224×224×3"] --> PATCH["分块<br/>16×16 patch"]
PATCH --> FLAT["展平为 196 个<br/>768 维向量"]
FLAT --> EMBED["Patch Embedding<br/>(线性投影)"]
EMBED --> POS["+ Position Embedding<br/>+ [CLS] token"]
POS --> TRANS["Transformer<br/>Encoder × L"]
TRANS --> CLS["取 [CLS] 输出"]
CLS --> HEAD["MLP Head<br/>分类"]
style IMG fill:#e1f5ff
style HEAD fill:#c4ffc4
关键步骤:
- Patch 切分:将 $224 \times 224$ 图像切成 $14 \times 14 = 196$ 个 $16 \times 16$ 的 patch
- Patch Embedding:每个 patch 展平为 $16 \times 16 \times 3 = 768$ 维向量,经线性投影得到 token
- [CLS] Token:在序列前添加一个可学习的 “[CLS]” token,其最终输出用于分类
- Position Embedding:添加可学习位置编码(ViT 使用可学习 PE 而非 Sinusoidal)
- Transformer Encoder:标准 Transformer 堆叠,通常 12–32 层
- 分类头:取 [CLS] 输出接 MLP
ViT 的归纳偏置与数据需求
| 对比维度 | CNN | ViT |
|---|---|---|
| 归纳偏置 | 强(局部性、平移不变性) | 弱(几乎无先验假设) |
| 小数据表现 | 优(偏置帮助快速收敛) | 差(需要海量数据弥补) |
| 大数据表现 | 饱和较快 | 持续提升,最终超越 CNN |
| 感受野 | 浅层小、深层逐步扩大 | 第一层就是全局 |
经验结论(ViT 原论文):
- 数据 < 1M(如 ImageNet-1k):ViT 明显差于 ResNet
- 数据 ~14M(ImageNet-21k):ViT 追平 ResNet
- 数据 ~300M(JFT-300M):ViT 大幅超越
这验证了一条深度学习核心原则:归纳偏置少 × 数据多 = 架构更灵活,上限更高。
ViT 的演进
| 模型 | 年份 | 关键创新 |
|---|---|---|
| ViT | 2020 | 纯 Transformer 处理图像的开山之作 |
| DeiT | 2020 | 蒸馏策略 + 数据增强,在 ImageNet-1k 上训练即可达到 SOTA |
| Swin Transformer | 2021 | 分层窗口注意力,重引入局部性归纳偏置;兼顾效率与泛化 |
| MAE | 2021 | 掩码自监督预训练(随机 mask 75% patch),ViT 预训练新范式 |
| DINOv2 | 2023 | 自监督 ViT 达到通用视觉基础模型水平 |
| SigLIP / CLIP | 2021-2023 | ViT 作为图文对比学习的图像编码器,驱动多模态大模型 |
ViT 不仅取代 CNN 成为视觉主干,更重要的是让图像与文本能共享同一套 Transformer 架构——这是 CLIP、LLaVA、GPT-4V 等多模态大模型能以简洁方式统一视觉与语言的基础。
4.4 图神经网络(GNN)
CNN 处理网格数据、RNN/Transformer 处理序列,但现实中大量数据是图(Graph) 结构——社交网络、分子结构、知识图谱、推荐系统的用户–物品二部图。这类数据节点数可变、无固定顺序、邻居数不定,CNN/RNN 的规则结构假设不再成立。图神经网络(Graph Neural Network,GNN) 专为这类非欧几里得数据设计。
核心机制:消息传递(Message Passing)
GNN 的统一范式是邻域聚合:每个节点反复地”收集邻居信息 → 聚合 → 更新自身表示”。第 $l$ 层的更新可写为:
\[h_v^{(l+1)} = \sigma\!\left( W^{(l)} \cdot \text{AGG}\big(\{ h_u^{(l)} : u \in \mathcal{N}(v) \}\big) + B^{(l)} h_v^{(l)} \right)\]其中 \(\mathcal{N}(v)\) 是节点 $v$ 的邻居集合,$\text{AGG}$ 是置换不变的聚合函数(求和 / 均值 / 最大 / 注意力加权),$\sigma$ 为非线性。堆叠 $L$ 层后,每个节点可感知 $L$ 跳以内的子图结构——这与 CNN 逐层扩大感受野异曲同工。
flowchart LR
U1["邻居 u₁<br/>表示 h(u₁)"] --> AGG["聚合 AGG<br/>求和/均值/注意力"]
U2["邻居 u₂<br/>表示 h(u₂)"] --> AGG
U3["邻居 u₃<br/>表示 h(u₃)"] --> AGG
V0["节点 v<br/>旧表示 h(v)"] --> UPD["更新<br/>σ(W·agg + B·h(v))"]
AGG --> UPD
UPD --> V1["节点 v<br/>新表示 h(v)′"]
style V0 fill:#c4e1ff
style V1 fill:#c4ffc4
style AGG fill:#ffe1c4
经典 GNN 对比
| 模型 | 年份 | 聚合方式 | 关键特点 |
|---|---|---|---|
| GCN(Kipf & Welling) | 2017 | 度归一化加权求和 | 谱图卷积的一阶近似,最经典基线 |
| GraphSAGE(Hamilton et al.) | 2017 | 采样邻居 + 均值/池化 | 归纳式(inductive),可泛化到未见节点,适合大图 |
| GAT(Veličković et al.) | 2018 | 注意力加权邻居 | 引入注意力,自适应分配各邻居权重 |
| GIN(Xu et al.) | 2019 | 求和 + MLP | 理论上达到 WL 图同构测试的判别上界,表达力最强 |
任务类型与核心挑战
GNN 的三类任务:节点级(节点分类,如引用网络中判断论文主题)、边级(链接预测,如推荐系统)、图级(整图分类,如分子性质预测)。
主要挑战——过平滑(Over-smoothing):层数过深时所有节点表示趋同、失去判别性,因此 GNN 通常只用 2–4 层,远浅于 CNN/Transformer。残差连接、跳跃知识(JKNet)、PairNorm 等是常见缓解手段。
与 Transformer 的关系:Transformer 可视为定义在全连接图上的 GNN——每个 token 是节点,自注意力即以注意力权重聚合所有其他节点。GAT 的邻居注意力与 Transformer 的自注意力同源。近年 Graph Transformer(如 Graphormer)把位置编码与全局注意力迁移到图上,在分子等图级任务取得 SOTA。
代表性工作:GCN(2017)、GraphSAGE(2017)、GAT(2018)、GIN(2019)、Graphormer(2021);应用涵盖 AlphaFold(蛋白质残基接触图)、药物发现、交通预测与推荐系统。
5. 训练优化技术
5.1 梯度下降与 Optimizer
标准梯度下降的更新公式为:
\[\theta_{t+1} = \theta_t - \eta \cdot g_t\]其中 $\eta$ 为学习率,$g_t$ 为 Loss 对参数的梯度。这种方式所有参数共享同一学习率,而实际 loss surface 中不同方向梯度差异悬殊,固定学习率难以兼顾,由此催生了自适应优化器。
动量法:像小球一样滚下山
Momentum(Polyak 1964,深度学习中由 Sutskever et al., 2013 重新发扬)模仿物理中小球滚下山坡的惯性:
\[v_t = \beta \cdot v_{t-1} + g_t \quad \text{(速度累积)}\] \[\theta_{t+1} = \theta_t - \eta \cdot v_t\]其中 $\beta \in [0, 1)$ 为动量系数(典型值 $0.9$),$v_t$ 是梯度的指数滑动平均——相当于”惯性”。
物理直觉:
| 场景 | 普通 SGD | Momentum SGD |
|---|---|---|
| 峡谷型 loss(一侧陡、一侧平) | 在陡壁间来回震荡,前进极慢 | 震荡被累积抵消,只保留沿谷底的净移动,加速前进 |
| 平坦区域(小梯度) | 步进极小,几乎停滞 | 速度累积多步小梯度,持续前进 |
| Saddle Point(鞍点) | 梯度近零时停滞 | 惯性带动跳出 saddle |
| 尖锐局部最小值 | 易陷入 | 惯性有机会冲过浅局部最小值 |
Nesterov Accelerated Gradient(NAG) 是动量的改进版:先按当前动量”预走一步”,在预测位置计算梯度,使惯性对即将到来的坡度更敏感——”前瞻式动量”。
\[v_t = \beta \cdot v_{t-1} + \nabla \mathcal{L}(\theta_t - \eta\beta v_{t-1})\]PyTorch 中通过 torch.optim.SGD(momentum=0.9, nesterov=True) 启用。
优化器演进
flowchart TD
SGD["SGD<br/>随机梯度下降<br/>1951"] -->|"加动量"| Momentum["Momentum SGD<br/>抑制震荡"]
SGD -->|"自适应 LR"| Adagrad["Adagrad 2011<br/>累积梯度平方"]
Adagrad -->|"指数移动平均"| RMSprop["RMSprop 2012<br/>适应非稳态"]
Momentum -->|"结合"| Adam["Adam 2014<br/>Momentum + RMSprop<br/>当前默认"]
Adam -->|"修正 L2"| AdamW["AdamW 2017<br/>大模型标配"]
AdamW -->|"二阶信息"| Sophia["Sophia 2023<br/>二阶 Hessian"]
AdamW -->|"正交化"| Muon["Muon 2024<br/>梯度正交化"]
AdamW -->|"Shampoo 等价"| SOAP["SOAP 2024<br/>Shampoo+AdamW"]
主流优化器对比
| 优化器 | 年份 | 动量 | 自适应 LR | 核心特点 | 适用场景 |
|---|---|---|---|---|---|
| SGD | — | ✗ | ✗ | 简单、对 LR 敏感 | CV 精调(结合调度) |
| Momentum SGD | — | ✓ | ✗ | 抑制震荡,越过 saddle | CV 训练 |
| Adagrad | 2011 | ✗ | ✓ | 稀疏特征友好,LR 单调减 | NLP 稀疏场景 |
| RMSprop | 2012 | ✗ | ✓ | 指数移动平均,适应非稳态 | RNN 训练 |
| Adam | 2014 | ✓ | ✓ | Momentum + RMSprop | 绝大多数任务默认选择 |
| AdamW | 2017 | ✓ | ✓ | Adam + 正确 Weight Decay | 大语言模型预训练标配 |
| Sophia | 2023 | ✓ | ✓ | 二阶 Hessian 估计 | LLM 预训练(论文声明约 2× 加速) |
| Muon | 2024 | ✓ | ✗ | 梯度正交化 | 中小规模预训练 |
| SOAP | 2024 | ✓ | ✓ | Shampoo 等价 + AdamW | 大批量 LLM 训练 |
注:Sophia/Muon/SOAP 的加速比例来自原论文在特定设置下的实验结果,实际表现因模型规模、数据分布、超参调优差异较大,生产环境中 AdamW 仍是经验上最稳健的默认选择。
Adam 的核心公式(Kingma & Ba,2014):
\[m_t = \beta_1 m_{t-1} + (1-\beta_1)g_t \quad \text{(一阶矩)}\] \[v_t = \beta_2 v_{t-1} + (1-\beta_2)g_t^2 \quad \text{(二阶矩)}\] \[\theta_{t+1} = \theta_t - \frac{\eta}{\sqrt{\hat{v}_t}+\epsilon}\hat{m}_t\]标准超参数:$\beta_1=0.9$,$\beta_2=0.999$,$\epsilon=10^{-8}$。Adam 的 $m_t$ 负责方向(可越过 saddle point);$v_t$ 负责大小(自适应调整各参数学习率)。两者互补,共同解决了梯度下降的两大核心难题。
5.2 学习率调度
固定学习率存在过大(震荡)和过小(过慢)的矛盾。大语言模型训练的标准方案:Warmup + Cosine Decay
| 训练阶段 | 相对 LR | 说明 |
|---|---|---|
| 起点(step 0) | 0 | 从零开始线性升温 |
| Warmup 结束 | 1.0(峰值) | 达到目标学习率 |
| 训练中期 | ~0.5 | 余弦衰减通过半程 |
| 训练末期 | ~0.05 | 接近零,参数缓慢”着陆” |
| 阶段 | 描述 | 目的 |
|---|---|---|
| Warmup(预热) | 前若干步 LR 从 0 线性增大到目标值 | 让 Adam 的 $m_t$/$v_t$ 积累准确统计量,避免初期不稳定 |
| Cosine Decay(余弦衰减) | LR 按余弦曲线降至接近 0 | 让参数缓慢”着陆”,避免在最优点附近持续震荡 |
其他常用调度器
| 调度器 | 曲线特征 | 适用场景 |
|---|---|---|
| StepLR | 每 $k$ epoch 将 LR 乘以 $\gamma$(如 0.1) | CV 经典训练(ResNet 原论文 30/60/90 epoch 降 10×) |
| MultiStepLR | 在指定 epoch 列表阶梯下降 | StepLR 的手工版,精确控制 |
| ExponentialLR | $\eta_t = \eta_0 \cdot \gamma^t$,每步按比例衰减 | 需要平滑衰减的场景 |
| ReduceLROnPlateau | 验证集 Loss 停滞 $p$ 个 epoch 后降 LR | 自适应;不需要预先知道总 epoch |
| Cosine Annealing Warm Restart | 余弦衰减到 0 后”重启”回高 LR,周期递增(SGDR) | 逃出局部最优,集成多个 checkpoint |
| 1Cycle(Leslie Smith, 2018) | 先升后降 + 动量反向同步变化 | CV 快速训练(FastAI 推崇) |
| Warmup + Linear Decay | 预热后线性衰减 | BERT 原论文、GLUE 微调常用 |
| Warmup + Cosine(当前主流) | 预热后余弦衰减 | 大语言模型预训练标配 |
选择原则:
- 从零训练 CNN:StepLR 或 Cosine Annealing(长训练用 Warm Restart)
- 微调预训练模型:Warmup + Linear / Cosine(低峰值 LR,通常 $1-5 \times 10^{-5}$)
- LLM 预训练:Warmup + Cosine(峰值 LR $\sim 3 \times 10^{-4}$,Warmup 占 0.5–2%)
- 验证集可用且不确定 epoch 数:ReduceLROnPlateau
- 快速原型 / 比赛:1Cycle(Smith 称可达”超收敛”效果)
5.3 参数初始化
不同的初始参数 $\theta_0$ 可能导致收敛到不同的局部最优解。
Xavier 初始化(Glorot & Bengio,2010,适用于 Sigmoid/Tanh 等对称激活):
\[W \sim \mathcal{N}\left(0, \frac{2}{n_{in}+n_{out}}\right)\]该方法兼顾前向激活与反向梯度的方差稳定,是对称激活函数的默认选择。
Kaiming 初始化(He et al.,2015,适用于 ReLU 激活):
\[W \sim \mathcal{N}\left(0, \frac{2}{n_{in}}\right)\]ReLU 会把一半输入置零,Xavier 的方差假设不再成立,因此 Kaiming 将方差放大 2 倍以补偿。这一初始化使几十层的 ReLU 网络训练初期激活值方差保持稳定,避免爆炸或消失。
选择原则:Sigmoid/Tanh 用 Xavier,ReLU 及其变体用 Kaiming。现代主流架构以 ReLU/GELU 为主,Kaiming 是事实标准。
预训练作为初始化(Pre-training):在大规模数据上先训练,再将参数迁移至目标任务。同时改善 Optimization(更好的起点)和 Generalization(学到通用特征)。
5.4 归一化方法
归一化(Normalization) 强制限制网络每一层的输出在合理范围内,使 loss surface 更平坦,学习率更易调节。
归一化方法对比
| 方法 | 年份 | 归一化维度 | 依赖 Batch | 适用场景 | 代表模型 |
|---|---|---|---|---|---|
| Batch Norm (BN) | 2015 | 跨样本、同特征维度 | ✓ | CNN 图像分类 | ResNet、EfficientNet |
| Layer Norm (LN) | 2016 | 单样本、所有特征 | ✗ | Transformer、序列模型 | BERT、GPT 系列 |
| Group Norm | 2018 | 单样本、分组特征 | ✗ | 小 batch CV(目标检测) | Mask R-CNN |
| Instance Norm | 2017 | 单样本、单通道 | ✗ | 图像风格迁移 | StyleGAN |
| RMSNorm | 2019 | 单样本(仅方差) | ✗ | LLM 高效训练 | LLaMA、Qwen、GPT-4 |
Batch Normalization(BN,Ioffe & Szegedy,2015):
\[\hat{x} = \frac{x - \mu_{batch}}{\sqrt{\sigma_{batch}^2 + \epsilon}}, \quad y = \gamma\hat{x} + \beta\]其中 $\gamma, \beta$ 为可学习的缩放与平移参数,赋予模型”取消归一化”的能力。
BN 训练与推理的关键差异
BN 在训练与推理时行为不同,这是工程实践最常踩的坑:
| 阶段 | $\mu, \sigma^2$ 来源 | 行为 |
|---|---|---|
| 训练 | 当前 mini-batch 即时计算 | 每个 batch 的均值方差略有差异,引入噪声起正则作用;同时更新 running_mean/running_var(指数滑动平均) |
| 推理 | 训练累积的 running_mean/running_var |
与 batch 无关,保证相同输入得到相同输出 |
常见 bug:PyTorch 中
model.eval()切换到推理模式会自动启用 running stats;忘记调用则推理时仍用当前 batch 统计,导致 batch size=1 时输出随机化。
BN 的局限与 LN 的必要性
BN 有三个致命短板,恰好对应 Transformer 选择 LN 的三个理由:
| 问题 | BN 表现 | LN 表现 |
|---|---|---|
| Batch 太小 | batch=1 时方差为 0,完全失效 | 与 batch 无关,batch=1 也正常 |
| 序列长度变化 | 不同样本不同长度,padding 污染统计量 | 每个样本独立归一化 |
| 分布式训练 | 需跨设备同步 batch 统计(SyncBN) | 完全局部计算,无通信开销 |
Layer Normalization(LN,Ba et al.,2016):
\[\hat{x}_i = \frac{x_i - \mu_{layer}}{\sqrt{\sigma_{layer}^2 + \epsilon}}\]LN 在每个样本的所有特征维度上归一化,与 batch size、序列长度完全解耦——这正是它成为 Transformer 标配的原因。
归一化维度对比直觉(以形状为 [N, C, H, W] 的 4D 特征图为例):
| 方法 | 归一化范围 | 跨样本? | 跨通道? |
|---|---|---|---|
| BN | 在 (N, H, W) 维度上,对每个 C 单独 | ✓ | ✗ |
| LN | 在 (C, H, W) 维度上,对每个 N 单独 | ✗ | ✓ |
| Instance Norm | 在 (H, W) 上,每个 (N, C) 单独 | ✗ | ✗ |
| Group Norm | 将 C 分组,组内归一化 | ✗ | 部分 |
RMSNorm(2019):去掉均值归一化,只保留方差缩放:
\[\text{RMSNorm}(x) = \frac{x}{\sqrt{\frac{1}{d}\sum_i x_i^2 + \epsilon}} \cdot \gamma\]计算量比 LN 少 $\sim 7\%$,且经验上质量几乎无损,被 LLaMA、Qwen、GPT-4 等主流大模型采用。
5.5 残差连接
深层网络(100+ 层)面临梯度消失与梯度爆炸的共存问题。Skip Connection / Residual Connection(He et al.,ResNet,2015):
\[\text{output} = F(x) + x\]即在原有变换 $F(x)$ 之上直接叠加输入 $x$(恒等映射)。即使 $F(x)$ 效果微弱,梯度依然可以通过恒等路径直接流回浅层,大幅缓解梯度消失,使 ResNet-152 等极深网络可以稳定训练。
残差连接的变体
ResNet 之后,残差连接发展出多个变体,各自权衡”恒等程度”与”信息密度”:
| 变体 | 年份 | 核心公式 | 特点 |
|---|---|---|---|
| Highway Network | 2015 | $y = T(x) \odot F(x) + (1-T(x)) \odot x$ | 用门控 $T$ 控制残差比例;ResNet 的前身 |
| ResNet v1 | 2015 | $y = \text{ReLU}(F(x) + x)$ | 原始残差块,激活在残差相加之后 |
| ResNet v2(Pre-activation) | 2016 | $y = F(x) + x$,BN/ReLU 在 $F$ 内部 | 激活放在残差之前,梯度更纯净地流回,支持 >1000 层 |
| DenseNet | 2017 | $x_l = H_l([x_0, x_1, \ldots, x_{l-1}])$ | 每层与之前所有层拼接,最大化特征复用 |
| ResNeXt | 2017 | ResNet + Grouped Conv | 多路径(cardinality)思想,参数更少性能更高 |
Pre-activation ResNet(v2)的关键洞察:原始 ResNet 的 ReLU(F(x)+x) 中 ReLU 会截断部分梯度;v2 将 BN-ReLU 移到 $F$ 内部,残差路径上完全是恒等映射,梯度无损穿透。这使得 ResNet-1001(1001 层!)能稳定训练。Transformer 的 Pre-LN 布局本质是同一思想的推广。
DenseNet 的反直觉:每层与前面所有层拼接,看似参数爆炸,实则因特征复用使每层可以更”瘦”(通常 growth rate 只有 32 通道),总参数量反而少于同深度 ResNet。缺点是显存占用高(需保存大量中间激活)。
Skip Connection 已成为现代深度学习中几乎所有架构(ResNet、Transformer、U-Net、Diffusion UNet)的标配组件,改善的是 Optimization——它解决的不是”深层网络能不能表达复杂函数”(浅层也能),而是”深层网络能不能被 SGD 训练出来”。
6. 损失函数与正则化
6.1 损失函数
损失函数(Loss Function)是机器学习三步骤框架的第一步,定义了”如何衡量模型好坏”。选择合适的损失函数对模型训练至关重要。
均方误差(MSE)
均方误差(Mean Squared Error,MSE) 适用于回归任务,衡量预测值与真实值的平方差均值:
\[\mathcal{L}_{MSE} = \frac{1}{N}\sum_{i=1}^N (y_i - \hat{y}_i)^2\]- 优点:处处可微,梯度计算简单;对较大误差惩罚更重(平方放大效应)
- 缺点:对异常值(outlier)极度敏感;当预测误差较大时梯度可能爆炸
平均绝对误差(MAE)
\[\mathcal{L}_{MAE} = \frac{1}{N}\sum_{i=1}^N |y_i - \hat{y}_i|\]- 优点:对异常值更鲁棒(线性惩罚而非平方)
- 缺点:在 $y_i = \hat{y}_i$ 处不可微(需用 Huber Loss 折中)
Huber Loss
\[\mathcal{L}_{Huber} = \begin{cases} \frac{1}{2}(y-\hat{y})^2 & |y-\hat{y}| \leq \delta \\ \delta|y-\hat{y}| - \frac{1}{2}\delta^2 & |y-\hat{y}| > \delta \end{cases}\]在误差小时用 MSE(平滑可微),在误差大时用 MAE(抗异常值),$\delta$ 控制切换阈值。常用于目标检测的回归分支。
交叉熵损失(Cross-Entropy)
交叉熵损失(Cross-Entropy Loss) 适用于分类任务,包括图像分类、语言模型(下一个 token 预测本质是多分类)。
第一步:将网络输出的 logits 经 Softmax 转换为概率分布:
\[p_i = \frac{e^{z_i}}{\sum_j e^{z_j}}\]第二步:计算与真实标签的交叉熵(取真实类别的对数概率,加负号):
\[\mathcal{L}_{CE} = -\sum_i \hat{p}_i \log p_i = -\log p_{y^*}\]其中 $y^*$ 为真实类别,$\hat{p}_i$ 为 one-hot 标签。
为什么不用准确率(Accuracy)作为 Loss? 准确率是阶跃函数,参数轻微变化时 Loss 几乎恒为零,梯度无法计算,Gradient Descent 无从进行。Cross-Entropy 处处可微,且值越小对应 Accuracy 越高。
数值稳定性:实际实现中将 Softmax 与 Cross-Entropy 合并(LogSoftmax + NLLLoss),避免 $e^{z_i}$ 数值溢出。
Label Smoothing(标签平滑)
Label Smoothing(Szegedy et al., 2016,由 Inception-v3 与原始 Transformer 广泛推广)是 Cross-Entropy 的一个简单但强力的正则化技巧。
动机:one-hot 标签要求模型对正确类别预测 1.0、其他为 0——这迫使模型把 logit 推到无穷大才能完全拟合,导致 过度自信(overconfidence)、泛化差、蒸馏效果弱。
做法:将硬标签 $\hat{p}_i$ 软化为:
\[\hat{p}_i^{\text{LS}} = \begin{cases} 1 - \epsilon & i = y^* \\ \epsilon/(K-1) & i \neq y^* \end{cases}\]其中 $K$ 为类别数,$\epsilon$ 为平滑系数(典型值 $0.1$)。正确类别期望概率降至 $0.9$,剩下 $0.1$ 均分给其他类。
效果:
- 抑制模型过度自信,校准(calibration)更好——即预测 90% 时实际准确率也接近 90%
- 轻微提升泛化(ImageNet 上 $\sim 0.2$–$0.5\%$ Top-1 提升)
- 改善知识蒸馏的教师软标签质量(软分布比 one-hot 承载更多信息)
注意:Label Smoothing 会损失少量 confidence 信息,在需要置信度选择的任务(主动学习、拒识)中需权衡。
二元交叉熵(Binary Cross-Entropy,BCE)
二分类任务(输出层用 Sigmoid):
\[\mathcal{L}_{BCE} = -[y \log \hat{p} + (1-y)\log(1-\hat{p})]\]Focal Loss
Focal Loss(Lin et al., 2017,提出于 RetinaNet)专为类别严重不平衡场景设计——如目标检测中背景框远多于前景框(1:1000)、医学图像中阳性样本稀少。
标准 Cross-Entropy 对易分类样本(预测概率 $p \to 1$)仍给出不可忽略的 loss,大量易样本会”淹没”少量难样本的梯度。Focal Loss 在 CE 前乘一个调制因子 $(1-p)^\gamma$:
\[\mathcal{L}_{Focal} = -\alpha(1-p)^\gamma \log p\]- $\gamma$(focusing parameter,典型值 2):当 $p \to 1$ 时 $(1-p)^\gamma \to 0$,几乎不产生梯度;当 $p \to 0$(难样本)时因子趋近 1,梯度正常
- $\alpha$(class balancing,典型值 0.25):静态调节正负类权重
效果:RetinaNet 首次让单阶段检测器在精度上追平两阶段的 Faster R-CNN,Focal Loss 功不可没。此后广泛用于长尾分类、异常检测、医学图像分割。
KL 散度
KL 散度(Kullback-Leibler Divergence) 衡量两个概率分布的差异,常用于知识蒸馏、变分自编码器(VAE):
\[\mathcal{L}_{KL}(P \| Q) = \sum_i P(i) \log \frac{P(i)}{Q(i)}\]交叉熵与 KL 散度的数学关系
Cross-Entropy 和 KL 散度不是两个独立的损失,而是同一个量的不同视角:
\[\text{CE}(P, Q) = H(P) + \text{KL}(P \| Q)\]其中 $H(P) = -\sum_i P(i) \log P(i)$ 是真实分布 $P$ 的熵。
推论:当 $P$ 是 one-hot 硬标签时,$H(P) = 0$,所以 CE $\equiv$ KL。因此在标准分类任务中,”最小化 Cross-Entropy”和”最小化 KL 散度”完全等价。
实用差异:
- 硬标签(one-hot):用 CE,计算简单
- 软标签(蒸馏、Label Smoothing、RLHF 参考策略):用 KL,因为 $H(P) \neq 0$ 时,CE 包含一个不可优化的常数项,KL 更干净地衡量”与目标分布的差距”
对比学习损失(Contrastive / Triplet Loss)
度量学习(Metric Learning) 的目标是学到一个嵌入空间,使”同类样本”距离近、”异类样本”距离远。两类经典损失:
Contrastive Loss(Hadsell et al., 2006):给一对样本 $(x_i, x_j)$,标签 $y=1$ 表示同类、$y=0$ 异类:
\[\mathcal{L}_{\text{contrastive}} = y \cdot d(x_i, x_j)^2 + (1-y) \cdot \max(0, m - d(x_i, x_j))^2\]其中 $d$ 是嵌入距离(通常欧氏),$m$ 是 margin 超参。
Triplet Loss(Schroff et al., 2015,FaceNet):给一个三元组(anchor $a$, positive $p$, negative $n$):
\[\mathcal{L}_{\text{triplet}} = \max(0, d(a, p) - d(a, n) + m)\]直觉是”正样本到锚点的距离 + margin 要小于负样本到锚点的距离”。FaceNet 用它学到的人脸嵌入在 LFW 上达到 99.63% 精度。
InfoNCE(Contrastive Predictive Coding,Oord et al., 2018):现代对比学习的主流形式,一个正样本对 $N-1$ 个负样本做 softmax:
\[\mathcal{L}_{\text{InfoNCE}} = -\log \frac{\exp(\text{sim}(q, k^+)/\tau)}{\sum_{i=0}^{N-1} \exp(\text{sim}(q, k_i)/\tau)}\]其中 $\tau$ 是温度系数。SimCLR、MoCo、CLIP 都基于 InfoNCE——这类损失驱动了 2020–2023 年自监督表示学习的爆发。
InfoNCE 本质就是 $N$ 分类的 Cross-Entropy——正样本是唯一”正确类别”,负样本是”其他类别”。这再次印证 CE 的普适性。
损失函数选择速查
| 任务类型 | 推荐损失函数 | 说明 |
|---|---|---|
| 回归(无异常值) | MSE | 梯度平滑,收敛快 |
| 回归(有异常值) | Huber Loss | 兼顾平滑与鲁棒性 |
| 二分类 | Binary Cross-Entropy | 配合 Sigmoid 输出层 |
| 多分类 | Cross-Entropy | 配合 Softmax 输出层 |
| 语言模型 | Cross-Entropy | 下一 token 预测 = 多分类 |
| 分布匹配 | KL 散度 | VAE、知识蒸馏、RLHF KL 约束 |
| 目标检测(框回归) | Smooth L1 / IoU Loss | 对齐检测任务特性 |
| 类别严重不平衡 | Focal Loss | 目标检测、长尾分类、医学图像 |
| 度量学习 / 人脸识别 | Triplet Loss、ArcFace | 学习判别性嵌入空间 |
| 自监督表示学习 | InfoNCE(对比学习) | SimCLR、MoCo、CLIP |
6.2 Dropout
Dropout(Srivastava et al.,2014):训练时以概率 $p$ 随机将神经元输出置零,测试时关闭 Dropout、所有神经元激活并将输出乘以 $(1-p)$ 缩放。
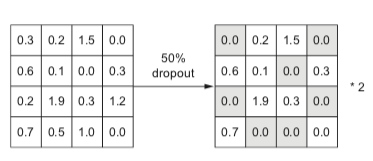
直觉:迫使网络在部分神经元缺席的情况下仍能正确预测,防止神经元之间的过度共适性(Co-adaptation),相当于同时训练了大量不同结构的子网络并取集成效果。
使用时机:仅在观察到 Overfitting 后使用;训练 Loss 降不下去时,加 Dropout 只会更糟。
6.3 数据增强
数据增强(Data Augmentation) 通过对训练样本施加保持语义的变换人为扩充数据量:
| 方法 | 领域 | 核心思想 | 年份 |
|---|---|---|---|
| 翻转/裁剪/颜色抖动 | 图像 | 经典手工增强,保持语义不变 | — |
| Mixup | 通用 | 两样本按比例混合,标签同步混合 | 2018 |
| CutMix | 图像 | 剪切粘贴区域,按面积比例混合标签 | 2019 |
| AutoAugment | 图像 | 强化学习搜索最优增强策略 | 2019 |
| RandAugment | 图像 | 随机采样增强,仅 2 个超参数,AutoAugment 的简化版 | 2020 |
| AugMix | 图像 | 多链增强混合 + Jensen-Shannon 一致性损失,提升分布鲁棒性 | 2020 |
| Time Stretch / Pitch Shift | 语音 | 变速变调,保持内容不变 | — |
| 同义词替换 / 回译 | 文本 | 语义等价改写 | — |
Mixup 公式:$\tilde{x} = \lambda x_i + (1-\lambda)x_j$,$\tilde{y} = \lambda y_i + (1-\lambda)y_j$
注意:数据增强的变换必须保持标签语义。若任务是判断鸟头朝向,则不能做左右翻转;若任务是说话人识别,则不能做语者转换。
使用时机:仅在 Overfitting 时有效;Training Loss 降不下去时,增加数据反而使优化更困难。
6.4 L2 正则化与 AdamW
L2 正则化(Weight Decay) 在 Loss 中加入参数的 L2 范数惩罚,使优化偏向参数绝对值更小的解(更”简单”的函数):
\[\mathcal{L}' = \mathcal{L}_{data} + \lambda \sum_i \theta_i^2\]AdamW(Loshchilov & Hutter,2017)修正了在 Adam 中加 L2 正则化的常见错误:传统方式将正则化梯度与普通梯度合并后统一经 Adam 缩放,导致正则化效果被自适应学习率”稀释”。AdamW 改为先对参数直接做 Weight Decay,再进行 Adam 更新:
θ = θ × (1 - lr × λ) # Weight Decay 直接作用于参数(不经自适应项缩放)
θ = θ - lr × Adam_update # Adam 正常更新
AdamW 是当前大语言模型训练的标准优化器,通常搭配梯度裁剪(Gradient Clipping)使用。
6.5 半监督学习与自监督学习
真实场景中标注数据稀缺、无标注数据廉价。半监督学习(Semi-supervised Learning) 与 自监督学习(Self-supervised Learning) 正是利用无标注数据的两条主流路径。
核心思想
| 方法 | 代表工作 | 核心机制 |
|---|---|---|
| Entropy Minimization | Grandvalet 2005 | 要求模型对无标注样本的预测尽量确定(低熵),隐含”类别边界应远离高密度区域”的假设 |
| Pseudo-Labeling | Lee 2013 | 用当前模型预测为无标注样本打伪标签,置信度高的纳入训练 |
| 一致性正则化 | Π-Model 2016、Mean Teacher 2017 | 同一样本施加不同扰动(增强、Dropout),要求输出一致 |
| FixMatch | Sohn et al. 2020 | 弱增强预测作为伪标签,监督强增强预测;当前 SSL 主流范式 |
| 对比学习 | SimCLR 2020、MoCo 2020 | 拉近同一图像不同视图的表示,推远不同图像 |
| 掩码建模 | BERT 2018、MAE 2021 | 随机遮盖部分输入,要求模型预测被遮内容 |
与现代大模型的关系
大语言模型的预训练本质上是最大规模的自监督学习——在海量无标注文本上做”预测下一个 token”(Causal LM)或”预测被 mask 的 token”(Masked LM),再通过少量标注数据微调(SFT、RLHF)适配下游任务。Pre-training + Fine-tuning 范式的成功,使得”标注数据稀缺”不再是深度学习落地的主要瓶颈。
7. 方法分类汇总
flowchart TD
A["神经网络训练技巧"] --> B["步骤三:改进 Optimization"]
A --> C["步骤二:改进网络架构"]
A --> D["步骤一:改进 Loss 与数据"]
B --> B1["Adam / AdamW<br/>自适应学习率+动量"]
B --> B2["LR Scheduling<br/>Warmup + Cosine Decay"]
B --> B3["Kaiming Init<br/>参数初始化"]
B --> B4["Pre-training<br/>同时改善 Opt+Gen"]
C --> C1["CNN<br/>Receptive Field + 参数共享<br/>改善 Generalization"]
C --> C2["Skip Connection<br/>缓解梯度消失爆炸<br/>改善 Optimization"]
C --> C3["BN / LN / RMSNorm<br/>主要改善 Optimization"]
D --> D1["Cross-Entropy<br/>使 Optimization 可行"]
D --> D2["Dropout<br/>改善 Generalization"]
D --> D3["Data Augmentation<br/>改善 Generalization"]
D --> D4["AdamW / Weight Decay<br/>改善 Generalization"]
各方法目标对照表:
| 方法 | 改进步骤 | 目标 | 备注 |
|---|---|---|---|
| Adagrad / RMSprop | 步骤三 | Optimization | 自适应学习率前身 |
| Adam | 步骤三 | Optimization | 当前默认优化器 |
| LR Scheduling | 步骤三 | Optimization | Warmup+Cosine 为大模型标配 |
| Kaiming Init | 步骤三 | Optimization | ReLU 网络的标准初始化 |
| Pre-training | 步骤三 | Opt + Gen | 两者同时改善,现代大模型核心 |
| CNN | 步骤二 | Generalization | 引入图像 Inductive Bias |
| Skip Connection | 步骤二 | Optimization | 使深层网络可训练 |
| Batch Norm | 步骤二 | Optimization(+Gen) | 依赖 batch 统计量 |
| Layer Norm | 步骤二 | Optimization(+Gen) | Transformer 标配 |
| Cross-Entropy | 步骤一 | 使 Opt 可行 | 分类/生成任务标准损失 |
| Dropout | 步骤三* | Generalization | 训练 Loss 会升高 |
| Data Augmentation | 步骤一 | Generalization | Overfitting 时才有效 |
| L2 Reg / AdamW | 步骤一/三 | Generalization | 偏好参数值更小的函数 |
| Semi-supervised | 步骤一 | Generalization | 利用无标注数据 |
8. 常用实验基准
评测基准是衡量进步的标尺。本节按领域梳理各阶段代表性 Benchmark——CV 的 MNIST/ImageNet、NLP 的 GLUE/MMLU,以及代码、数学推理、长上下文等近年新战场。一条反复出现的规律是:旧基准被攻克(接近饱和)→ 催生更难的新基准,这场”基准军备竞赛”本身就是领域进展的缩影,可一边浏览下方表格一边对照这条主线。
8.1 计算机视觉基准
MNIST
| 属性 | 内容 |
|---|---|
| 发布年份 | 1998 |
| 规模 | 70,000 张手写数字图像(28×28,灰度) |
| 类别数 | 10(数字 0-9) |
| SOTA 精度 | >99.8%(基本饱和) |
| 特点 | 最经典的入门基准,适合验证基础方法 |
CIFAR-10 / CIFAR-100
| 属性 | CIFAR-10 | CIFAR-100 |
|---|---|---|
| 发布年份 | 2009 | 2009 |
| 规模 | 60,000 张彩色图像(32×32) | 60,000 张彩色图像(32×32) |
| 类别数 | 10 | 100 |
| 适用 | 正则化、数据增强、网络架构验证 | 细粒度分类 |
Dropout、Batch Normalization、ResNet、Data Augmentation 的效果均在此基准上得到广泛验证。
ImageNet(ILSVRC)
| 属性 | 内容 |
|---|---|
| 发布年份 | 2010 |
| 规模 | 120 万张训练图像,5 万张验证图像 |
| 类别数 | 1,000 |
| 特点 | 深度学习工业级基准,CNN 发展史的主战场 |
ImageNet Top-1 精度演进(见第四节表格):AlexNet(56.5%)→ VGG(71.5%)→ ResNet(76.0%)→ EfficientNet(84.4%)→ 当前 SOTA ≈ 91%,12 年内提升约 35 个百分点。
8.2 自然语言处理基准
GLUE / SuperGLUE
| 基准 | 发布 | 任务数 | 用途 |
|---|---|---|---|
| GLUE | 2018 | 9 | 文本分类、推理、相似度等 NLU 任务综合评测 |
| SuperGLUE | 2019 | 8 | GLUE 饱和后的更难版,BERT 超越人类促成升级 |
BERT(2018)发布时在 GLUE 上大幅超越人类水平,直接推动了 SuperGLUE 的设立。
MMLU(Massive Multitask Language Understanding)
| 属性 | 内容 |
|---|---|
| 发布年份 | 2021 |
| 规模 | 57 个学科、约 16,000 道选择题 |
| 涵盖 | 数学、法律、医学、历史、计算机科学等 |
| 用途 | 评测 LLM 的知识广度与推理能力 |
| 人类水平 | 约 89.8%(专家) |
GPT-4(2023)在 MMLU 上达到 86.4%,Claude 3 Opus 达到 88.7%(2024),接近专家人类水平。
语言模型困惑度(Perplexity)
Penn Treebank(PTB)/ WikiText 是传统语言模型的标准基准,评测指标为困惑度(Perplexity,PPL)——越低越好,表示模型对下一个 token 的预测越确定。现已被 MMLU、HumanEval 等综合 Benchmark 取代。
代码能力基准
评测 LLM 写代码能力,几乎所有前沿模型发布必报。
| 基准 | 发布 | 规模 | 任务形式 | 评测方式 |
|---|---|---|---|---|
| HumanEval | 2021 (OpenAI) | 164 题 | Python 函数补全 | 单元测试 pass@1 |
| MBPP | 2021 (Google) | 974 题 | Python 基础题 | 单元测试 |
| HumanEval+ | 2023 | 扩展 HumanEval | 额外加 80× 测试用例 | 更严格的 pass@1 |
| LiveCodeBench | 2024 | 持续更新 | LeetCode 最新题 | 防训练数据污染 |
| SWE-bench | 2023 | 2294 题 | 真实 GitHub 仓库 bug 修复 | 运行测试套件 |
| SWE-bench Verified | 2024 | 500 题 | 人工验证子集 | 更可靠评测 |
演进:GPT-4(67%)→ Claude 3.5 Sonnet(92% HumanEval)→ 最新模型已接近饱和;SWE-bench 成为 2024 年之后的主战场(Claude Sonnet 4 / GPT-5 solve rate ~60–70%)。
数学推理基准
| 基准 | 发布 | 难度 | 特点 |
|---|---|---|---|
| GSM8K | 2021 | 小学应用题 | 8.5K 题,考察多步算术推理 |
| MATH | 2021 | 竞赛级(AMC/AIME) | 12.5K 题,数学奥赛风格 |
| AIME | 每年更新 | 美国数学邀请赛 | 防训练污染,前沿模型主战场 |
| Putnam | — | 大学生数学竞赛 | 极端难度,测试顶尖推理 |
GSM8K 已被前沿模型基本攻克(>95%);MATH 进入饱和期;AIME 成为 o1、DeepSeek-R1 等推理模型的主要评测场。
长上下文基准
随着上下文窗口从 2K→32K→128K→1M 扩展,单纯的 perplexity 已不能反映模型的长上下文能力,出现了专门基准:
| 基准 | 发布 | 评测形式 | 关注点 |
|---|---|---|---|
| Needle-in-a-Haystack | 2023 | 在长文档中藏一句关键信息,要求模型召回 | 定位精度随位置与长度变化 |
| LongBench | 2023 | 21 个任务、6 大类(QA、摘要、代码等) | 多维度综合评测 |
| RULER | 2024 | 13 种合成任务,难度可控扩展 | 当前最严格的长上下文基准 |
| ∞BENCH | 2024 | 平均 200K tokens | 测试真实超长场景 |
| LOFT | 2024 | 长文档 RAG、工具调用 | 真实 Agent 场景 |
Needle-in-a-Haystack 的发现:多数声称支持 128K 的模型在 90K+ 位置召回率显著下降;Claude、Gemini-1.5 Pro 等在 1M 上下文中仍能保持 >99% 召回,体现了长上下文工程的实际差异。
9. 高效训练与推理
9.1 混合精度训练
现代 GPU 支持 FP16/BF16 运算。混合精度训练以低精度完成前向传播和梯度计算(节省显存 50%、加速计算 2-3×),以 FP32 执行参数更新(保证数值稳定)。
| 格式 | 指数位 | 尾数位 | 优点 | 劣势 |
|---|---|---|---|---|
| FP32 | 8 | 23 | 最稳定 | 显存占用大 |
| FP16 | 5 | 10 | 快 | 数值范围小,易溢出 |
| BF16 | 8 | 7 | 数值范围同 FP32,稳定 | 精度略低于 FP16 |
BF16(Brain Float 16)因指数位更宽(8 位 vs FP16 的 5 位),数值范围更大,已成为大语言模型训练的首选低精度格式。
9.2 Gradient Clipping(梯度裁剪)
大模型训练中偶发的梯度爆炸(loss spike)会导致训练崩溃。梯度裁剪通过限制梯度 L2 范数的上界来防止这一问题:
\[g \leftarrow g \cdot \min\left(1, \frac{\tau}{\|g\|_2}\right)\]通常阈值 $\tau = 1.0$,是 AdamW 的标准搭档。
9.3 梯度检查点(Gradient Checkpointing)
训练时,反向传播需要前向过程中所有中间激活值计算梯度——深层网络下,激活值显存占用可达参数本身的数倍,成为大模型训练显存的主要开销。
梯度检查点(Chen et al.,2016)只保存若干”检查点”层的激活值,反向传播时对未保存的中间层重新前向计算一次,以约 33% 的额外计算时间换取激活显存降至 $O(\sqrt{N})$ 量级。
| 项目 | 标准训练 | 梯度检查点 |
|---|---|---|
| 激活显存 | $O(N)$ | $O(\sqrt{N})$ |
| 前向计算量 | 1× | 1× |
| 反向计算量 | 1× | ~2×(重算前向) |
梯度检查点与混合精度、ZeRO、张量并行组合使用,是千亿参数大模型训练的标准显存优化手段(HuggingFace Transformers 的 gradient_checkpointing=True、PyTorch 的 torch.utils.checkpoint)。
9.4 Flash Attention
标准注意力的瓶颈在于需要将 $N \times N$ 注意力矩阵写入 GPU HBM 显存,显存复杂度 $O(N^2)$,长序列时极其昂贵。
| 版本 | 年份 | 相对标准注意力加速 | 关键创新 |
|---|---|---|---|
| Flash Attention 1 | 2022 | 2–4× | IO-aware 分块计算,显存 $O(N)$ |
| Flash Attention 2 | 2023 | 4–9× | 改进并行化与 warp 分区,达 70% A100 FLOP/s |
| Flash Attention 3 | 2024 | 6–18×(vs FA1) | 针对 H100 Hopper 架构;异步流水线;FP8 支持,达 75% H100 FLOP/s(约 1.2 PFLOP/s) |
Flash Attention 在保持精确计算(非近似)的同时大幅降低显存和加速计算,已成为所有主流大模型的标配。
10. 模型压缩与适配
10.1 混合专家模型(MoE)
Mixture of Experts(MoE) 的核心思想:把一个大 FFN 拆成 $N$ 个独立”专家”,由一个路由器(Router / Gating Network) 为每个 token 选择 top-$k$ 个专家进行计算。只激活部分专家意味着——参数量巨大但每次前向只用其中一小部分。
flowchart LR
X["Token<br/>hidden state"] --> R["Router<br/>(小 MLP)"]
R -->|"top-2 scores"| S["softmax 加权"]
X --> E1["Expert 1<br/>FFN"]
X --> E2["Expert 2<br/>FFN"]
X --> EN["Expert N<br/>FFN"]
E1 -.->|"选中"| S
E2 -.->|"选中"| S
S --> Y["加权输出"]
style E1 fill:#c4e1ff
style E2 fill:#c4e1ff
style EN fill:#f0f0f0
核心指标
| 指标 | 含义 | 示例(Mixtral 8×7B) |
|---|---|---|
| 总参数量 | 所有专家参数之和 | 47B |
| 激活参数量 | 每次前向实际计算的参数 | 13B |
| 专家总数 | $N$ | 8 |
| Top-k | 每 token 激活的专家数 | 2 |
代表性工作
| 模型 | 年份 | 总参数 | 激活参数 | 专家结构 |
|---|---|---|---|---|
| Switch Transformer | 2021 | 1.6T | — | top-1 路由 |
| GShard | 2020 | 600B | — | top-2 路由 |
| Mixtral 8×7B | 2023 | 47B | 13B | 8 专家、top-2 |
| DeepSeek-V3 | 2024 | 671B | 37B | 256 共享专家 + 细粒度路由 |
| GPT-4(推测) | 2023 | $\sim$1.8T | $\sim$280B | MoE 架构(未官方公开) |
关键挑战:负载均衡(防止所有 token 涌向少数专家)——通常加入辅助损失惩罚极端路由分布。
10.2 参数高效微调(PEFT)
随着预训练模型参数量膨胀至百亿、千亿,全参数微调(Full Fine-tuning) 的显存与存储成本变得不可接受。Parameter-Efficient Fine-Tuning(PEFT) 只训练极少量额外参数(通常 <1%),即可逼近全参微调效果。
主流 PEFT 方法对比
| 方法 | 年份 | 可训练参数比例 | 核心思想 | 特点 |
|---|---|---|---|---|
| Adapter | 2019 | ~3% | 每层插入小 bottleneck MLP | 推理时引入额外计算 |
| Prefix Tuning | 2021 | <1% | 在输入前添加可学习的”软 prompt” | 不改原模型;效果对任务敏感 |
| Prompt Tuning | 2021 | <0.1% | 仅在 Embedding 层加软 prompt | 最轻量;只在超大模型上效果好 |
| LoRA | 2021 | 0.1–1% | 对权重矩阵注入低秩更新 $\Delta W = BA$ | 当前 PEFT 事实标准 |
| QLoRA | 2023 | 与 LoRA 同 | 4bit 量化底模 + LoRA 微调 | 可在单张 24GB GPU 微调 65B 模型 |
| DoRA | 2024 | 与 LoRA 略多 | 将权重拆解为方向+幅度分别更新 | 在低秩设定下质量优于 LoRA |
LoRA 核心公式
对于预训练权重 $W_0 \in \mathbb{R}^{d \times k}$,LoRA 冻结 $W_0$,只训练低秩分解 $B \in \mathbb{R}^{d \times r}, A \in \mathbb{R}^{r \times k}$($r \ll \min(d,k)$,典型 $r=8, 16, 64$):
\[W = W_0 + \Delta W = W_0 + BA\]前向计算:$h = W_0 x + BAx$。
优势:
- 训练:仅 $B, A$ 需要梯度和优化器状态,显存需求降至 $\sim 1/100$
- 存储:一个任务只需保存 $BA$(MB 级),一套底模可加载数百个任务的 LoRA
- 推理:可将 $BA$ 合并进 $W_0$,推理零开销
- 切换任务:加载不同 LoRA 权重即可秒级切换场景
LoRA 与 QLoRA 几乎是当前所有开源大模型微调(SFT、DPO)的默认选择。
10.3 模型量化(Quantization)
量化将模型权重(和激活)从 FP16/BF16 压缩到 INT8/INT4 甚至更低位宽,以少量精度损失换取模型大小降至 1/4~1/8、推理速度提升 2-4×。
量化类型
| 类型 | 何时量化 | 代表方法 | 特点 |
|---|---|---|---|
| PTQ(Post-Training Quantization) | 训练完成后 | GPTQ、AWQ、SmoothQuant | 无需重训,几小时完成 |
| QAT(Quantization-Aware Training) | 训练时模拟量化 | LSQ、DoReFa | 精度最高,需重训 |
| 混合精度 | 关键层保留高精度 | 多数部署场景 | 工程折衷 |
现代量化方法
| 方法 | 年份 | 位宽 | 核心思想 |
|---|---|---|---|
| GPTQ | 2022 | INT4/INT3 | 逐层最小化量化误差(二阶方法) |
| AWQ | 2023 | INT4 | 激活感知:保护对输出影响大的权重不被量化 |
| SmoothQuant | 2023 | W8A8 | 将激活的离群值”迁移”到权重,降低量化难度 |
| bitsandbytes | 2022 | INT8/NF4 | HuggingFace 生态标准库,支持 QLoRA |
| FP8 | 2022 | FP8 | H100 硬件原生支持,训练推理通用 |
经验:对 7B+ 规模的 LLM,INT4 量化通常带来 <1% 质量损失,但模型大小从 14GB 压至 4GB——可在消费级显卡(24GB)上运行 70B 模型。
10.4 知识蒸馏(Knowledge Distillation)
知识蒸馏(Hinton et al., 2015)将一个大”教师”模型的能力迁移到小”学生”模型中,使部署时能用小模型达到接近大模型的性能。
核心思想:软标签比硬标签信息更丰富
one-hot 硬标签只告诉学生”这张图是猫”;而教师模型输出的软概率分布能告诉学生:”这张图 90% 是猫、8% 是狗、1% 是狐狸、0% 是汽车”——这些类别间的相对关系(”狗比狐狸更接近猫”)蕴含了教师的知识。
蒸馏损失:
\[\mathcal{L}_{KD} = \alpha \cdot \mathcal{L}_{CE}(y^*, p_s) + (1-\alpha) \cdot T^2 \cdot \mathcal{L}_{KL}(p_t^{(T)} \| p_s^{(T)})\]其中:
- $p_t^{(T)} = \text{softmax}(z_t / T)$ 是教师用温度 $T$ 软化的输出($T > 1$ 时分布更平滑)
- $p_s^{(T)}$ 是学生对应的软化输出
- $\alpha$ 平衡硬标签监督与软标签蒸馏
蒸馏的三种范式
| 范式 | 迁移内容 | 代表工作 |
|---|---|---|
| Response-based(输出蒸馏) | 最终 logits 分布 | Hinton 2015、DistilBERT |
| Feature-based(中间层蒸馏) | 隐藏层激活、注意力图 | FitNets、TinyBERT |
| Relation-based(关系蒸馏) | 样本间关系、层间关系 | RKD、CRD |
代表性工作
| 模型 | 年份 | 教师 → 学生 | 效果 |
|---|---|---|---|
| DistilBERT | 2019 | BERT-base → 6 层 | 参数减 40%,保留 97% 性能 |
| TinyBERT | 2019 | BERT → 4 层 | 参数减 87%,速度 9× |
| MobileBERT | 2020 | BERT-large → 紧凑模型 | 移动端推理 |
| Gemini Flash | 2024 | Gemini Pro → 小模型 | 当前 LLM 蒸馏典型 |
| Claude Haiku | 2024 | Claude Opus → 小模型 | 快速推理、低成本 |
当前 LLM 实践:前沿厂商先训练最大的”旗舰”模型,再通过蒸馏(+ RLHF)得到更小、更快、更便宜的系列模型(如 Claude 3 Opus/Sonnet/Haiku)。蒸馏 + 量化 + MoE 是现代大模型部署优化的三驾马车。
11. 前沿架构与大模型
11.1 人类反馈强化学习(RLHF)
RLHF(Reinforcement Learning from Human Feedback) 是 ChatGPT 成功的关键——将预训练大模型从”会说话”对齐到”听得懂指令、符合人类偏好”。
flowchart LR
PT["预训练 LLM<br/>(GPT-3)"] --> SFT["Step 1: SFT<br/>监督微调"]
SFT --> RM["Step 2: 训练奖励模型<br/>人类对多个回答排序"]
RM --> PPO["Step 3: PPO 强化学习<br/>最大化奖励"]
PPO --> ALIGNED["对齐后的模型<br/>(ChatGPT)"]
style PT fill:#e1f5ff
style ALIGNED fill:#c4ffc4
三阶段流程
| 阶段 | 数据 | 目标 |
|---|---|---|
| SFT(Supervised Fine-Tuning) | 人工撰写的 (prompt, 优质回答) 对 | 教模型基础指令遵循能力 |
| Reward Model 训练 | 人类对同一 prompt 的多个回答排序 | 学习一个能给回答打分的模型 |
| PPO 强化学习 | 用 SFT 模型生成回答,RM 打分,PPO 优化策略 | 让模型输出最大化 RM 奖励 |
RLHF 的替代方案
| 方法 | 年份 | 相对 RLHF |
|---|---|---|
| DPO(Direct Preference Optimization) | 2023 | 跳过 RM 与 PPO,直接在偏好数据上闭式优化;训练简单、稳定 |
| IPO / KTO | 2023 | DPO 变体,更鲁棒 |
| RLAIF | 2023 | 用 AI(如 Claude)代替人类标注偏好 |
| Constitutional AI | 2022 | Anthropic 提出,用一组”宪法”原则指导模型自我批评 |
DPO 因训练稳定、无需 RM,已在开源社区取代 PPO 成为主流对齐方法。但前沿闭源模型(GPT-4o、Claude)仍多采用 PPO 或其改进版。
11.2 生成模型:从 AE 到 GAN
| 判别模型学的是 $$p(y | x)\((给定输入预测标签),**生成模型**学的是数据分布\)p(x)$$ 本身,因而能”无中生有”地采样出新样本。深度生成模型有四大家族,沿着”采样质量 / 训练稳定性 / 隐空间可控性”的权衡不断演进:自编码器(AE)→ 变分自编码器(VAE)→ 生成对抗网络(GAN)→ 扩散模型(下一节详述)。 |
自编码器(Autoencoder, AE)
编码器 $f$ 把输入压缩到低维隐向量 $z$,解码器 $g$ 重建出 $\hat{x}$,训练目标是重建误差 \(\mathcal{L} = \|x - g(f(x))\|^2\)。AE 擅长降维 / 去噪 / 表示学习,但隐空间无概率约束、分布不规则,无法从中随机采样生成新样本——它本质是压缩器,而非真正的生成模型。
变分自编码器(VAE,Kingma & Welling 2013)
| VAE 给隐空间加上概率结构:编码器输出一个分布 $$q_\phi(z | x)\((而非单点),并约束其接近先验\)p(z)=\mathcal{N}(0,I)$$。训练最大化证据下界(ELBO): |
前一项是重建项、后一项是把隐分布拉向先验的正则项。通过重参数化技巧 \(z = \mu + \sigma \odot \epsilon\)(\(\epsilon \sim \mathcal{N}(0,I)\))让采样可微、梯度可回传。训练后从先验 \(p(z)\) 直接采样即可生成。VAE 采样稳定、隐空间连续可插值,但生成图像偏模糊。
生成对抗网络(GAN,Goodfellow et al. 2014)
GAN 用对抗博弈绕开显式似然:生成器 $G$ 把噪声映射为假样本,判别器 $D$ 学习区分真假,两者交替优化一个 minimax 目标:
\[\min_G \max_D \ \mathbb{E}_{x \sim p_{\text{data}}}[\log D(x)] + \mathbb{E}_{z \sim p_z}[\log(1 - D(G(z)))]\]GAN 生成的图像锐利、质量高(StyleGAN 人脸几可乱真),但训练以不稳定著称——模式崩塌(mode collapse)、博弈难收敛,需大量技巧(WGAN、谱归一化等)来稳住。
四大家族一览
| 家族 | 隐变量 | 训练目标 | 采样 | 稳定性 | 典型短板 |
|---|---|---|---|---|---|
| AE | 确定性 | 重建误差 | ✗ 不能生成 | 高 | 隐空间不规则 |
| VAE | 概率(高斯) | ELBO(重建 + KL) | 一步,快 | 高 | 生成偏模糊 |
| GAN | 噪声 → 样本 | 对抗 minimax | 一步,快 | 低 | 模式崩塌 |
| Diffusion | 逐步加噪 | 去噪回归 | 多步迭代,慢 | 高 | 推理慢 |
flowchart LR
AE["AE<br/>压缩重建"] --> VAE["VAE 2013<br/>概率隐空间"]
VAE --> GAN["GAN 2014<br/>对抗博弈"]
GAN --> DIFF["Diffusion 2020<br/>去噪生成"]
style AE fill:#e1f5ff
style DIFF fill:#c4ffc4
扩散模型综合了 VAE 的训练稳定与 GAN 的高质量,成为当前生成建模的主流——下一节展开。
11.3 扩散模型(Diffusion Models)
扩散模型是深度学习近年最成功的生成范式,驱动了 Stable Diffusion、DALL-E 3、Midjourney、Sora 等划时代工作,是深度生成建模与 Transformer 并列的另一大支柱。
核心思想:加噪与去噪
flowchart LR
X0["x₀<br/>清晰图像"] -->|"前向:逐步加噪"| XT["xₜ<br/>纯噪声"]
XT -->|"反向:学习去噪"| XM["x̂₀<br/>生成图像"]
style X0 fill:#c4ffc4
style XT fill:#ffcccc
style XM fill:#c4e1ff
前向过程(Forward / Diffusion):给真实数据逐步加高斯噪声,经过 $T$ 步(通常 1000)变为近似标准正态分布:
\[q(x_t | x_{t-1}) = \mathcal{N}(x_t; \sqrt{1-\beta_t} \cdot x_{t-1}, \beta_t I)\]由于性质可推导,$x_t$ 可从 $x_0$ 一步得到:\(x_t = \sqrt{\bar{\alpha}_t} \cdot x_0 + \sqrt{1-\bar{\alpha}_t} \cdot \epsilon\),其中 \(\bar{\alpha}_t = \prod_{s=1}^t (1-\beta_s)\)。
反向过程(Reverse / Denoising):训练一个神经网络 \(\epsilon_\theta(x_t, t)\) 预测每一步加入的噪声,训练损失即:
\[\mathcal{L} = \mathbb{E}_{t, x_0, \epsilon}\left[\|\epsilon - \epsilon_\theta(x_t, t)\|^2\right]\]推理时,从标准正态分布采样 $x_T$,然后用 \(\epsilon_\theta\) 逐步去噪,$T$ 步后得到生成样本。
为什么扩散模型比 GAN 成功?
| 维度 | GAN | Diffusion |
|---|---|---|
| 训练稳定性 | 两网络博弈,易 mode collapse | 单网络回归,非常稳定 |
| 样本多样性 | 模式崩塌(只生成少数样本类型) | 覆盖数据分布完整 |
| 生成质量 | SOTA 较难保持 | 当前 SOTA |
| 推理速度 | 单次前向(快) | 多步迭代(慢) |
| 可控生成 | 条件控制较复杂 | 天然适配 Classifier-Free Guidance |
代表性工作
| 模型 | 年份 | 关键创新 |
|---|---|---|
| DDPM | 2020 | 扩散模型现代复兴,简洁训练目标 |
| DDIM | 2020 | 确定性采样,推理步数从 1000 → 50 |
| Classifier-Free Guidance | 2022 | 无需分类器即可实现条件控制 |
| Latent Diffusion / Stable Diffusion | 2022 | 在 VAE 潜空间扩散,算力降低 10× |
| DALL-E 2 | 2022 | CLIP + Diffusion,文本到图像突破 |
| Imagen | 2022 | 大规模文本编码器 + 级联扩散 |
| ControlNet | 2023 | 精确姿态/边缘/深度控制 |
| SDXL | 2023 | 开源 SOTA 图像生成 |
| Sora | 2024 | 视频扩散模型,DiT 架构 |
| Stable Diffusion 3 / Flux | 2024 | Rectified Flow + MMDiT |
从 UNet 到 DiT:扩散网络的 Transformer 化
早期扩散模型用 UNet(带 skip connection 的编码-解码 CNN)作为去噪网络。2022 年后出现DiT(Diffusion Transformer,Peebles & Xie, 2022),用 Transformer 替换 UNet——Sora、Stable Diffusion 3 均采用 DiT。这再次印证了 Transformer 统一多领域的趋势。
11.4 状态空间模型与 Mamba
Transformer 的注意力机制对序列长度 $N$ 的计算和显存复杂度均为 $O(N^2)$,处理长序列时代价极高。状态空间模型(State Space Model,SSM) 提供了一种复杂度线性的替代架构路线。
SSM 基础:连续时间线性动力系统
SSM 源于控制论,将输入序列 $x(t)$ 通过隐藏状态 $h(t)$ 映射到输出序列 $y(t)$:
\(h'(t) = Ah(t) + Bx(t)\) \(y(t) = Ch(t)\)
其中 $A \in \mathbb{R}^{N \times N}$ 为状态转移矩阵,$B, C$ 为投影矩阵。离散化(步长 $\Delta$,零阶保持)后得到递推形式:
\[h_t = \bar{A} h_{t-1} + \bar{B} x_t, \quad y_t = C h_t\]其中 $\bar{A} = e^{\Delta A}$,$\bar{B} = (\Delta A)^{-1}(e^{\Delta A} - I) \cdot \Delta B$。
SSM 兼具 RNN 与 CNN 的优点:
| 角色 | 等价形式 | 优势 |
|---|---|---|
| 训练时 | 等价为 1D 卷积($y = x * k$,$k$ 为卷积核) | 完全并行化 |
| 推理时 | 等价为递归(RNN 风格) | 显存 $O(1)$,常数时间步 |
S4:结构化状态空间序列模型
S4(Gu et al., 2021)是第一个实用的深度 SSM:将矩阵 $A$ 限制为 HiPPO 初始化的对角加低秩(DPLR) 结构,使长序列训练高效可行,在 Long Range Arena 等长序列基准上大幅超越 Transformer。
S4 的局限:$A, B, C$ 矩阵对所有时间步固定(time-invariant),无法根据输入内容动态选择关注或忽略哪些信息——本质上是静态滤波器。
Mamba:选择性状态空间模型(2023)
Mamba(Gu & Dao, 2023)的核心创新是选择性(Selectivity):将 $B, C$ 和步长 $\Delta$ 设计为输入依赖(input-dependent) 的:
\[\Delta, B, C = \text{Linear}(x_t)\]这使模型能根据当前 token 的内容动态决定”保留多少过去状态”($\Delta$ 大 → 更新状态,$\Delta$ 小 → 忽略当前输入,类似注意力机制)。
硬件感知并行扫描:直接对 $h_t = \bar{A} h_{t-1} + \bar{B} x_t$ 的递推做并行前缀扫描(parallel prefix scan),全程在 GPU SRAM 中完成,避免频繁写回 HBM,显存复杂度 $O(N)$,训练速度与 Transformer 相当。
Mamba 块结构(每层):
flowchart LR
X["输入 x"] --> L1["线性投影 × 2"]
L1 --> |"主路径"| CONV["1D 卷积<br/>(短程局部感知)"]
CONV --> ACT["SiLU 激活"]
ACT --> SSM["选择性 SSM<br/>(Δ,B,C 来自输入)"]
SSM --> MUL["⊗ 门控"]
L1 --> |"门控路径"| MUL
MUL --> L2["线性投影"]
L2 --> Y["输出 y"]
style SSM fill:#c4e1ff
Mamba 2(2024)
Mamba 2(Dao & Gu, 2024)提出 State Space Duality(SSD),证明 Mamba 的选择性 SSM 是线性注意力的结构化特例,从而在统一框架下优化实现:
- 利用矩阵乘法分块(tensor cores)替代扫描,速度比 Mamba 1 快 2–8×
- 将状态大小扩展到更大维度,提升模型容量
Transformer vs Mamba 对比
| 维度 | Transformer | Mamba |
|---|---|---|
| 序列复杂度(计算) | $O(N^2)$ | $O(N)$ |
| 序列复杂度(显存) | $O(N^2)$(注意力矩阵) | $O(N)$(激活) |
| 推理 KV Cache | $O(N)$(随上下文增长) | $O(1)$(隐藏状态固定大小) |
| 训练并行性 | 完全并行 | 并行扫描(接近并行) |
| 全局依赖建模 | 显式注意力(强) | 隐式状态传递(选择性) |
| 长序列性能 | 显著下降 | 保持线性 |
| in-context 检索 | 很强 | 相对弱(状态压缩有损) |
代表性工作
| 模型 | 年份 | 关键创新 / 应用 |
|---|---|---|
| S4 | 2021 | 结构化 SSM,Long Range Arena SOTA |
| H3 | 2022 | SSM + Attention 混合,语言任务 |
| Mamba | 2023 | 选择性 SSM + 硬件感知算法,语言建模竞争 Transformer |
| Mamba 2 | 2024 | SSD 统一框架,2–8× 加速 |
| Vision Mamba / VMamba | 2024 | 视觉 Mamba,图像分类/分割 |
| MambaByte | 2024 | 字节级语言建模,无 tokenizer |
| Jamba | 2024 | Mamba + Transformer 交替层(AI21 Labs),47B 参数 |
| Zamba | 2024 | 小规模 Mamba-Transformer 混合,推理效率 SOTA |
| RWKV | 2023 | 类 RNN 线性注意力,Transformer 训练范式 + RNN 推理 |
| RetNet | 2023 | 微软提出的递推注意力,训练并行 + 推理递推 |
现状与展望:Mamba 及 SSM 系列是当前最受关注的 Transformer 替代架构,在语言、视觉、基因组学等领域展示出竞争性能。但在通用推理和 in-context 学习能力上,纯 SSM 仍弱于 Transformer。主流趋势是 Mamba + Transformer 混合架构(如 Jamba、Zamba),以兼顾长序列效率与全局推理能力。
11.5 深度学习与大语言模型
深度学习(尤其是 Transformer)是大语言模型(LLM)的技术基础。本文与 LLM 训练综述分工如下:
| 本文关注 | LLM 训练综述关注 |
|---|---|
| 通用深度学习原理与经典架构 | LLM 工程栈的端到端细节 |
| CNN / RNN / Transformer 基本机制 | Scaling Laws(Chinchilla、Kaplan) |
| 优化器、归一化、正则化通用方法 | 预训练数据工程与课程学习 |
| MoE / PEFT / 量化 / RLHF 概念介绍 | 3D 并行(DP / TP / PP)、ZeRO、FSDP |
| 主流 Benchmark 概览 | 长上下文训练(YaRN、NTK 插值) |
| 基础知识蒸馏思想 | KV Cache 优化、Continuous Batching、PagedAttention、Speculative Decoding |
如需了解 LLM 预训练/微调/推理的具体工程细节,请参阅:
涵盖 Scaling Laws、分布式训练、混合并行、KV Cache、GQA/MQA 内部实现、长上下文外推、推理加速等主题。
12. 总结
贯穿全文的主线只有一条:机器学习三步骤框架(Loss → 架构 → 优化)× 两大核心目标(Optimization vs Generalization)。每一项训练技巧都精确落在这张 3×2 坐标系上的某一格,详见第 7 节方法分类汇总表。
核心结论:
深度学习的训练技巧不是越多越好,而是要对症下药——先看训练 Loss:降不下去是 Optimization 问题,不要加 Dropout;训练 Loss 低而验证 Loss 高才是 Generalization 问题,此时才考虑数据增强与正则化。这是高效炼丹的基本功,也是本文反复强调的判别原则。