
CausalNav (2026)
———First Scene Graph-based Semantic Navigation for Dynamic Outdoor Environments
📄 Paper: https://arxiv.org/abs/2601.01872
精华
CausalNav 的核心亮点在于将多层级场景图(Embodied Graph)与 RAG 机制深度结合,实现了支持开放词汇查询的长程语义导航——”图即知识库”的设计范式值得借鉴。其次,层次化 Embodied Graph 构建策略(从细粒度对象节点到粗粒度建筑物与聚类节点)展示了如何在多空间尺度上统一语义表示与检索。第三,基于时空走廊(Spatial-Temporal Corridor)的动态对象过滤机制,无需额外标注即可区分静态、准静态与动态障碍物,是处理室外动态场景的实用方案。第四,使用本地开源 LLM 替代商业 API 完成层次语义检索,证明了在自主平台上脱离云端仍可实现高质量语义推理。
1. 研究背景/问题
室外大规模动态环境中的自主语义导航面临三大挑战:开放词汇的语义理解、动态环境适应(行人、车辆等移动障碍物)以及长期稳定性。现有 VLN 研究主要聚焦于静态室内场景,依赖高精度地图或大规模训练数据,在真实室外动态场景中的长程导航鲁棒性未得到充分验证。
2. 主要方法/创新点
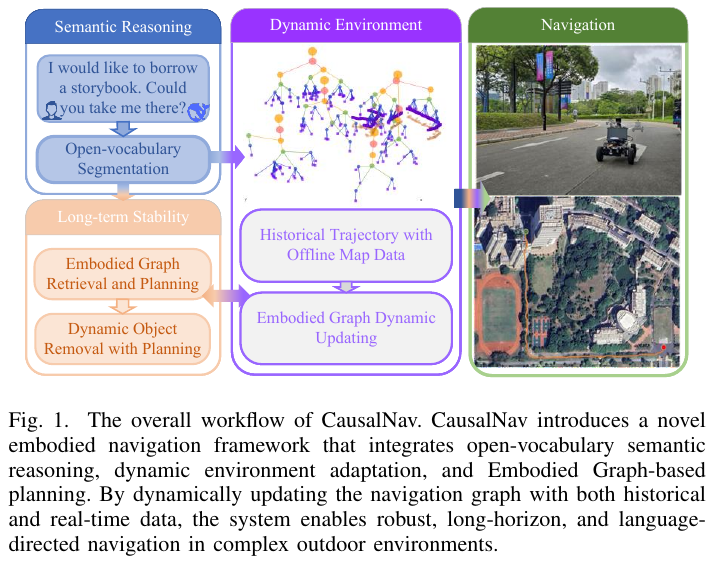
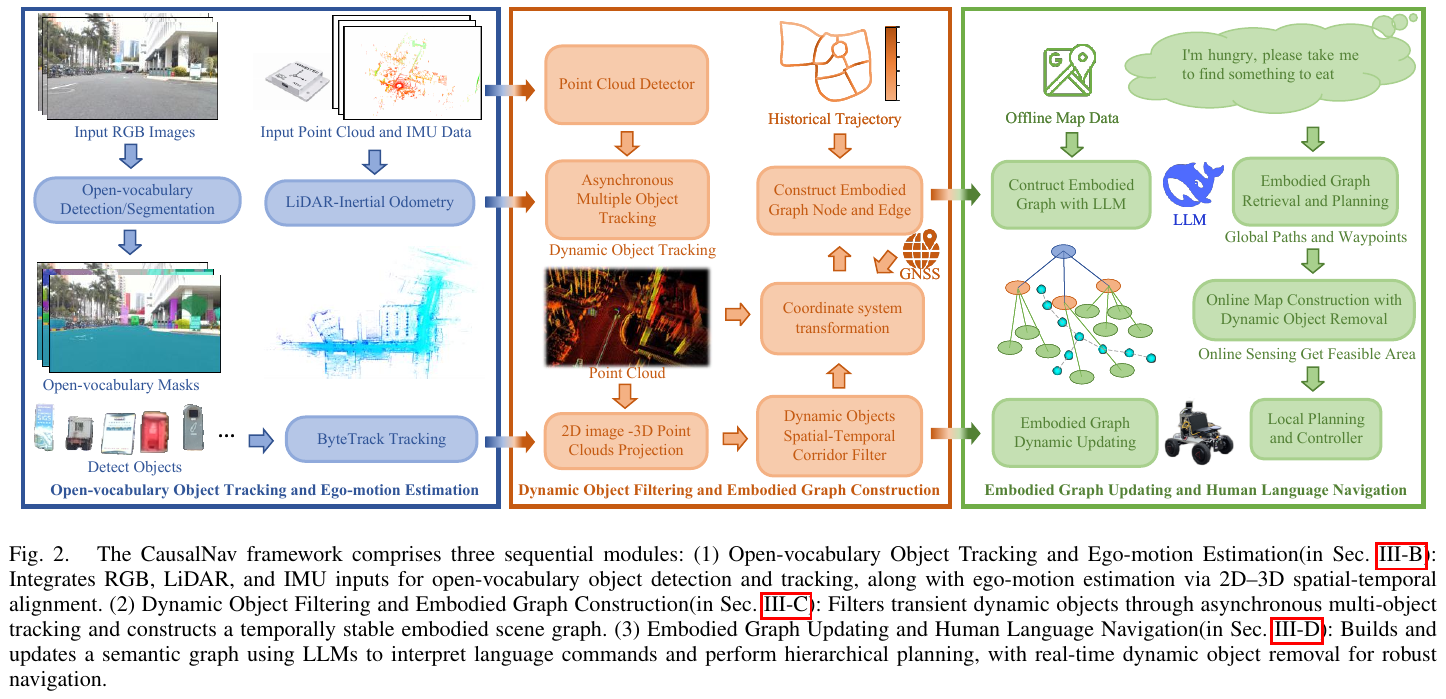
CausalNav 提出了一个由三个核心模块构成的语义导航框架:
模块一:开放词汇目标跟踪与自我运动估计
使用 YOLO-World 从 RGB 图像中提取开放词汇的 2D 检测框和分割掩码,通过 ByteTrack 进行多目标跟踪。结合 LiDAR 点云将 2D 检测投影至 3D 空间,获得目标的 3D 姿态 $^w\mathbf{T}_{obj}$。自车运动通过 LiDAR-IMU 里程计(FAST-LIO2)估计,提供精确的定位与坐标变换基础。
模块二:动态对象过滤与 Embodied Graph 构建
-
时空走廊过滤:将每个目标的历史轨迹编码为时空走廊 $\mathcal{T} = {^w\mathbf{T}^n_{obj}, \text{3DBBox}i, t_i}{i=1}^n$。若目标在 $k$ 步内位移超过阈值,则认定为动态目标并从图中移除,有效消除运动引起的虚假节点。
-
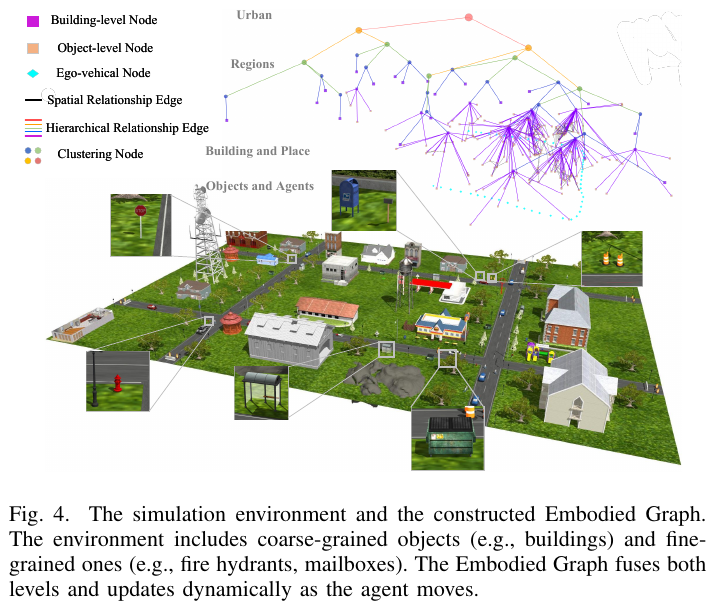
Embodied Graph 层次构建:静态环境由两类节点组成——建筑物节点 $\nu_i^{build}$ 来自离线地图,对象节点 $\nu_i^{obj}$ 来自实时感知。使用 LLM 对节点进行层次聚类(spatial-semantic similarity),形成多级抽象:对象层(Level $L-1$)→ 建筑物/Place 层(Level $L$)→ 聚类节点(Clustering Node)。每次自车移动超过距离阈值 $d$,新增自车节点 $\nu_i^l$ 记录历史轨迹。
-
RAG 语义检索:基于 LLM 打分的层次化检索,结合空间相似性 $\kappa^{spatial}$ 和语义相似性 $\kappa^{semantic}$,在图中逐层选择最匹配查询的节点路径,支持开放词汇目标定位。
模块三:Embodied Graph 动态更新与自然语言导航
-
全局规划:解析自然语言指令,通过 RAG 检索 Embodied Graph 推断目标位置,优先使用历史轨迹中的 Dijkstra 最短路径;若目标不可达,则调用离线地图或 Google Maps 生成粗粒度路线,结果表示为路点序列 $\mathcal{W} = {w_1, w_2, \ldots, w_n}$。
-
局部规划:采用 RH-Map 进行实时动态局部地图构建,通过 Informed-RRT* 生成初始轨迹,再使用 NMPC-CBF(Nonlinear Model Predictive Control with Control Barrier Function)进行轨迹跟踪与动态避障,保证对移动行人/车辆的安全性。
3. 核心结果/发现
仿真实验(对比 ViNT、NoMaD、GNM、CityWalker):
- Small 任务:SR 100%,SPL 88.9%,CC 0.2(所有方法中最优)
- Medium 任务:SR 92%,SPL 82.2%
- Large 任务:SR 80%,SPL 66.0%,CC 1.2,TL 141.82m
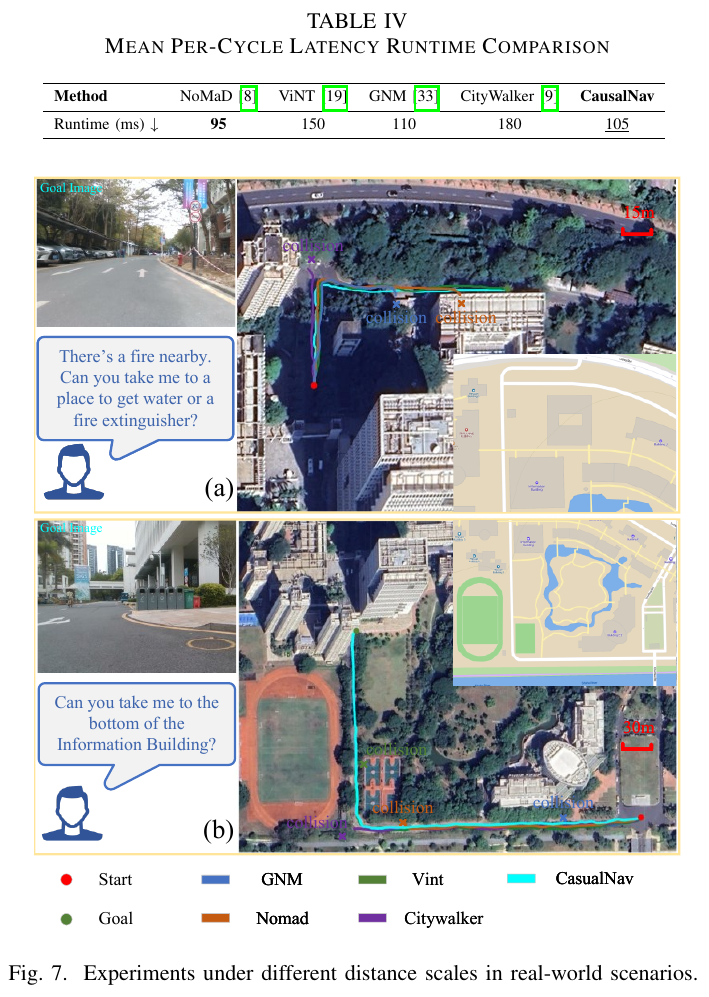
真实世界实验:
- 短程(130m):ViNT 和 CausalNav 均成功,其他方法失败
- 长程(512m):仅 CausalNav 成功完成任务,其他方法因碰撞失败
- CityWalker 在真实世界表现显著差于仿真,对光照变化和动态障碍物敏感
消融实验:
- 启用 Embodied Graph 动态更新:SR 从 78% 提升至 90%,SPL 从 54.7% 提升至 80.1%
- 最优超参数:$\alpha=\beta=0.5$,$\gamma=1.5$(空间-语义平衡点)
- 运行时延:105ms/cycle(10Hz),比 NoMaD 仅多 11% 开销
4. 局限性
CausalNav 在极端光照/天气条件下的鲁棒性有待提升,且长程图记忆的压缩与遗忘机制尚未完善,可能在超长时间运行后出现图膨胀和检索精度下降问题。